亚体素控制的双材料多结构细丝的微流控打印
发布日期:2023-11-22
浏览量:1562次
具有多种材料、复杂结构和复杂功能的细丝在可穿戴电子设备、柔性执行器和传感器中都有着非常重要的作用。直接墨水书写技术(DIW)主要用于打印功能性细丝。然而,由于挤出通道本身结构的不可移动,目前可打印的多材料纤维的复杂性和油墨成分是静态不可调节的。这一局限性严重阻碍了直接墨水书写3D打印技术的发展。因此,对打印的组分进行动态可调的亚体素控制,以指导具有多种结构的纤维的打印,为实现可用于打印复杂结构细丝的直接墨水书写技术提供了一种新的策略。
近日,北京航空航天大学机械学院陈华伟课题组提出了一种动态可调节的DIW打印策略,该策略将一个可移动的打印针连接到一个Y形微流控喷嘴中,通过调节挤出压力和针头在微流控喷嘴中的运动,能够精确控制细丝内层的位置、比例和形状,进而再对细丝内层结构进行精确的亚体素控制,可以制造具有各种复杂结构的细丝。
通过打印平台,制造了内部波浪型结构的可拉伸电导稳定和摩擦电纳米发电机纤维,以实现能量收集和自供电传感。这种亚体素控制的微流控打印显著增加了双材料细丝的复杂性,为柔性电子产品提供了潜在的应用。相关研究内容以“Subvoxel-controlled Microfluidic Printing of Dual-Material and Multi-Structural Filaments”为题发表在《Advanced Materials Technologies》期刊上,陈华伟教授、张力文为通讯作者,硕士生白子涵为第一作者。
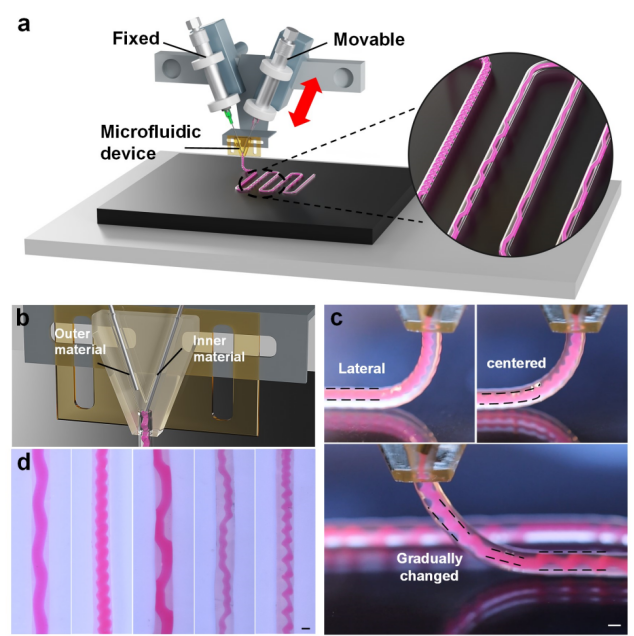
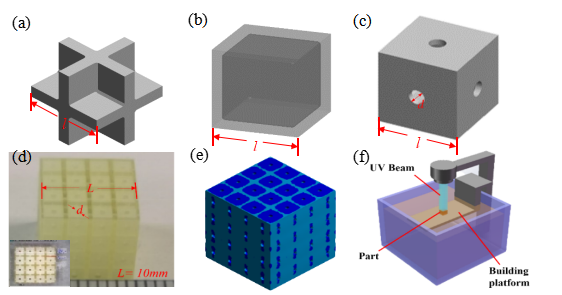
图1. 可编程亚体素控制的双材料多结构细丝的微流控打印平台。a) 打印平台及双材料多结构打印机制示意图。b) 将两个打印针放置在 Y 形微流控装置中,用于内外材料打印。c) 一侧、居中或逐渐改变。d)通过调整内层材料打印针的位置,内外层材料的分布可以被精确广泛的调节,实现对细丝的亚体素控制。比例尺,500 μm。
该研究构建了一种动态可调节的DIW打印平台,如图1所示。该平台由一个三轴线性运动平台与一个微流体打印头构成,为了实现亚体素控制的细丝,该打印头是由一个Y形流道的微流控芯片、一个电机控制的微动台、一个固定的打印针和一个可移动的打印针组成,两个打印针从Y形流道的两个臂中插入。该微流控芯片使用了摩方精密公司的nanoArch®S240高精度3D打印机制造,内通道尺寸最小为800μm,通道尺寸决定了打印细丝的直径及打印的精度,高精度的微流控芯片通道也保证了通道和打印针之间的良好配合。固定打印针为细丝提供外部材料,利用微动台驱动可移动的打印针,并在细丝所需的位置挤出内部功能材料。动态准确地控制可动针的挤出压力和运动下,实现了各种亚体素图案的细丝,例如一侧、居中或逐渐改变的波浪形图案。
此外,内外材料的组合可以用其他各种材料替代,从而证明了这种打印策略的普遍性。实验表明,在打印过程中,通过调整外层材料的粘度以达到适印性要求,但是,对于内部材料的粘度,不需要进行此类调整。为了证明制造功能性长丝的能力,通过将打印材料替换为导电的功能性材料,设计并打印了具有波浪形内部结构的多功能、可拉伸的导电稳定纤维和摩擦电纳米发电机纤维。与同轴结构相比,导电稳定性和摩擦发电性能均有所提高。因此,它可以作为智能织物来收集生物力学能量,满足多样化的需求。除了打印不同的功能材料外,还可用于制造精密微流控通道、气动等微纳机器人,也为未来宏观尺度上的直接墨水书写技术提供了一种打印方法。
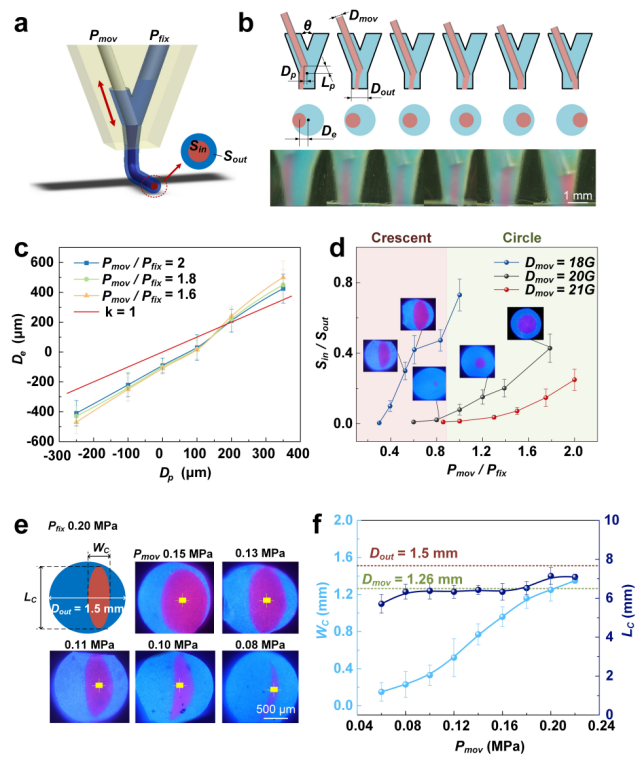
图2. 精确控制内层的位置和形状。a) 同轴结构3D打印工艺示意图。b) 在不同位置打印的可动针的示意图和光学图像。c) 不同Pmov/Pfix下Dp对De的影响。d) 不同尺寸可动针的 Pmov/Pfix 和 Sin/Sout 之间的依赖性。e) 内部横截面逐渐变为新月形的光学图像。f) 新月形的宽度和长度对 Pmov 的依赖性。
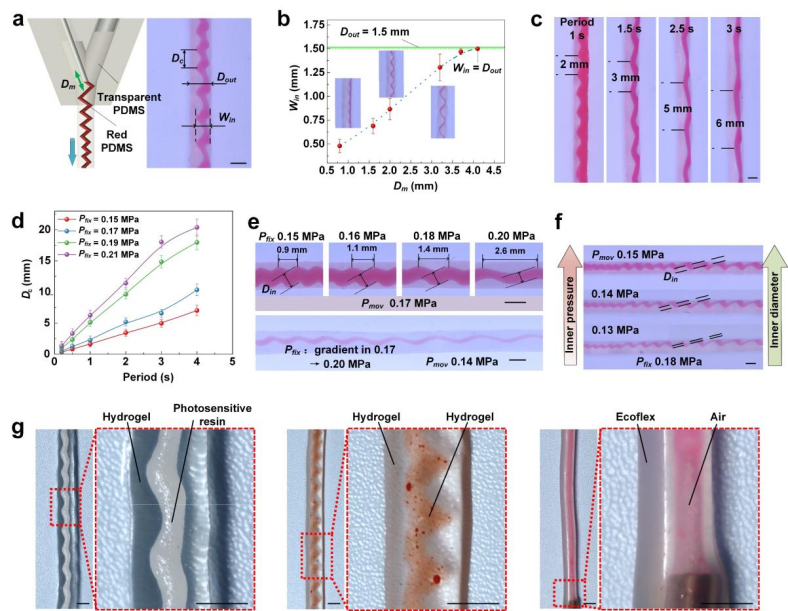
图3. 精确控制内部波浪结构。a) 内部具有波浪形结构的细丝的印刷示意图。b) Dm 和 Win 之间的关系曲线。c) 波峰距离 Dc逐渐增加。d) 不同Pfix下移动周期与波峰距离的依赖性。e-f) 内部具有波浪形结构的细丝的照片。g) 含有更多材料的长丝照片。
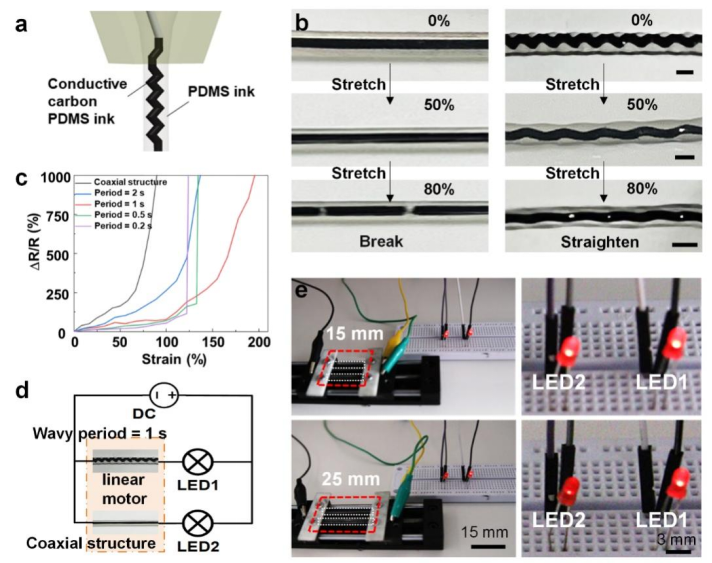
图4. 多功能可拉伸电导稳定纤维的打印。a) 多功能可拉伸电导稳定纤维的打印示意图。b) 在同轴纤维和内部波浪结构纤维上拉伸。c) 不同移动周期下同轴纤维和波浪纤维的应变电阻变化率。d) 同轴结构纤维和波浪形内结构纤维的等效工作电路。e) 同轴结构纤维和波浪形内结构纤维的拉伸电导率试验的照片。
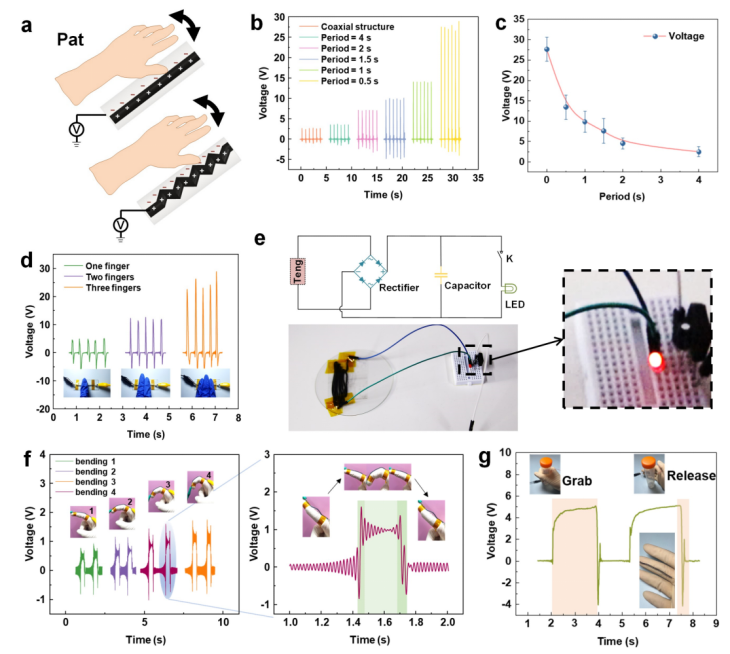
图5. 可拉伸导电纤维可以作为理想的高度可拉伸的自供电传感器。a)纤维拍打产生电压信号,作为摩擦纳米发电机纤维。b) 同轴纤维和波浪纤维的实时电压信号。c) 纤维电压信号与移动周期的关系曲线。d) 不同手指拍打波浪形结构纤维的实时电压信号。e)自充电系统的等效工作电路和自充电系统为LED供电的照片。f) 纤维传感器在不同弯曲角度下粘附在人手指上的相应电压信号。g)通过抓取和释放塑料离心管的信号监测。
原文链接:
https://doi.org/10.1002/admt.202301150