南方科技大学郭传飞课题组《Nature Communications》:具有高时空分辨率的机器人感知系统用于纹理识别
发布日期:2023-11-20
浏览量:1668次
机器人技术对触觉感知的需求不断增加,以实现机器人与周围环境的友好互动。通常,采用柔性触觉传感器及人工感知系统来实现这一功能。现有的柔性触觉传感器主要专注于对物理刺激的精确检测,如压力、剪切力和应变等,以提供在机器人抓取或操作任务中更精准的反馈。然而,在触摸目标物体时往往缺乏感知和识别真实世界的能力。相比之下,人类的皮肤,特别是指尖,不仅能感受和估量物体的重量,还能帮助识别接触到的物体纹理、粗糙度和形状等参数。
人体的指纹和皮下的机械感受器在纹理触觉中发挥着关键作用。手指在滑动过程中,使指纹嵌入物体表面的微结构里,通过滑动摩擦产生了低频压力刺激和高频振动刺激,并由皮肤中的慢适应机械感受器(SA)和快适应机械感受器(FA)分别检测到相应的力刺激,该刺激产生的电位信号通过神经系统传递至大脑,供进一步的分析和判断(识别)。然而,现有的研究很难在单一传感器中同时实现SA和FA感受器的功能。因此,人工感知系统通常使用两个传感器(以及两个收集和处理不同类型信号的电路),一个用于检测静压,另一个专门用于检测振动,这无疑增加了传感系统集成和数据处理的难度。
近日,南方科技大学的郭传飞课题组研发了一种基于柔性滑觉传感的机器人触觉感知系统用于纹理识别。该传感器中,表面的指纹结构和传感器中的微结构层对传感性能起到关键作用。团队采用摩方精密nanoArch®S130(精度:2μm)3D打印设备,实现了类指纹结构模板和分级微结构模板的高精度打印,并结合倒模技术制备了柔性PDMS人工指纹(周期:350 μm,高度:260μm)和具有分级微结构的离子凝胶(周期:200μm,高度: 55μm)。
这种应用需要传感器具备高灵敏和快响应的性能,以实现对微小的结构起伏(高度)和精细的结构间距产生响应。团队选择了低粘度离子凝胶,并结合分级离-电传感界面的设计,使滑觉传感器具有高灵敏度(519kPa-1)和超快的响应-弛豫速度(2.4ms),可同时检测静压和高达400 Hz的高频振动。此外,传感器能够探测出周期为15μm、高度为6μm的微小结构,展现出卓越的空间分辨率。在400Hz的高频振动下,柔性滑觉传感器能够区分出0.02Hz的频率变化,频率分辨率达0.005%。这种极高的时空分辨率使滑觉传感器能够准确区分具有紧密间距的微小表面特征,这对机器人在纹理识别方面具有重要意义。
本研究将柔性滑觉传感器集成在机械手上,并建立起机器人触觉感知系统。在固定滑动速度下,该触觉传感系统对20种结构相似的织物识别准确率高达100%。在随机滑动速度下,由于数据的多样性和复杂性,置信度略有下降,然而,平均识别准确率始终在98.5%以上。这一感知系统有望为机器人提升触觉能力。
相关研究成果以“A robotic sensory system with high spatiotemporal resolution for texture recognition”为题发表在期刊《Nature Communications》上。该工作得到了国家自然科学基金委、广东省科技厅和深圳市科创委的大力支持。
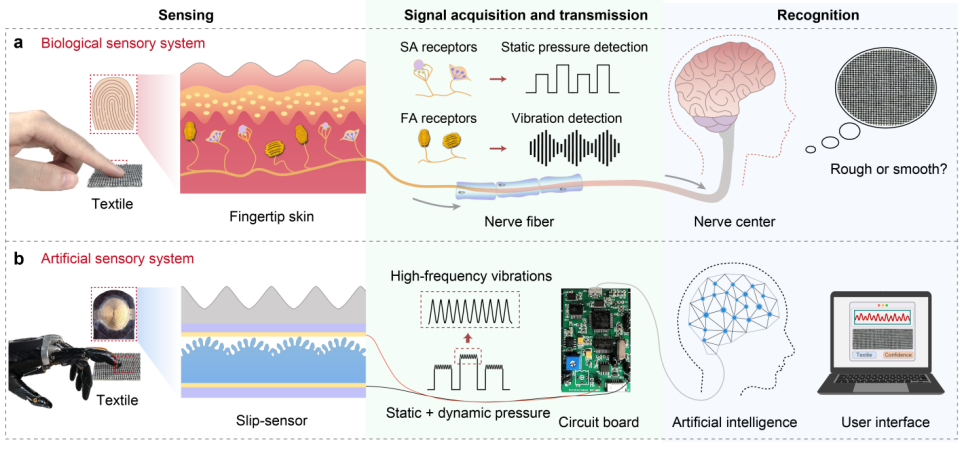 图1. 模仿人类感官系统进行纹理识别的机器人感知系统。a. 人类的生物感官系统;b 本研究的人工触觉感知系统。
图1. 模仿人类感官系统进行纹理识别的机器人感知系统。a. 人类的生物感官系统;b 本研究的人工触觉感知系统。
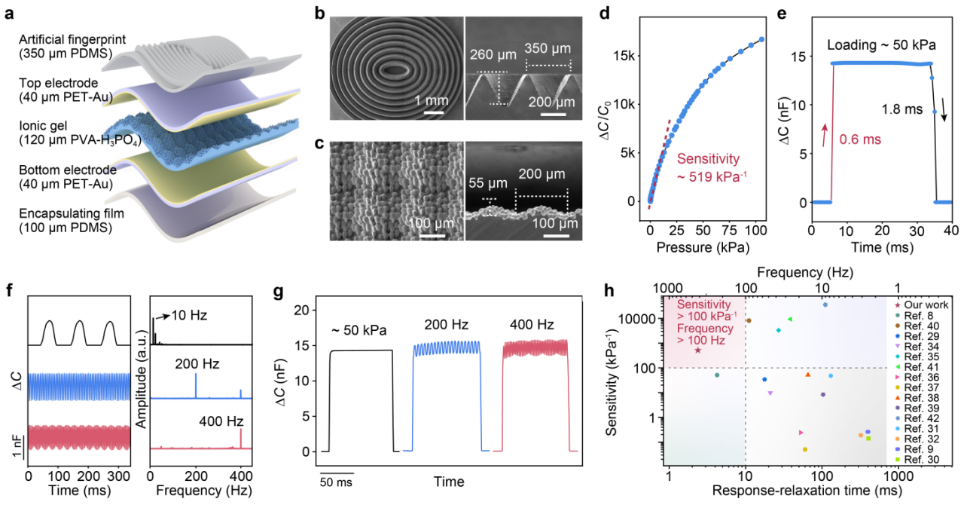 图2. 滑觉传感器的结构、传感特性以及静态和动态压力性能。a. 滑觉传感器的结构示意图;b. 人工指纹的微观形貌图;c. PVA-H3PO4 凝胶的形貌图;d. 传感器的响应曲线;e. 滑觉传感器的响应-松弛时间;f. 传感器在振动频率为10、200 和 400 Hz的电容响应以及对应的频谱;h. 滑觉传感器与现有电容式传感器在灵敏度、响应-弛豫时间、频率带宽的对比。
图2. 滑觉传感器的结构、传感特性以及静态和动态压力性能。a. 滑觉传感器的结构示意图;b. 人工指纹的微观形貌图;c. PVA-H3PO4 凝胶的形貌图;d. 传感器的响应曲线;e. 滑觉传感器的响应-松弛时间;f. 传感器在振动频率为10、200 和 400 Hz的电容响应以及对应的频谱;h. 滑觉传感器与现有电容式传感器在灵敏度、响应-弛豫时间、频率带宽的对比。
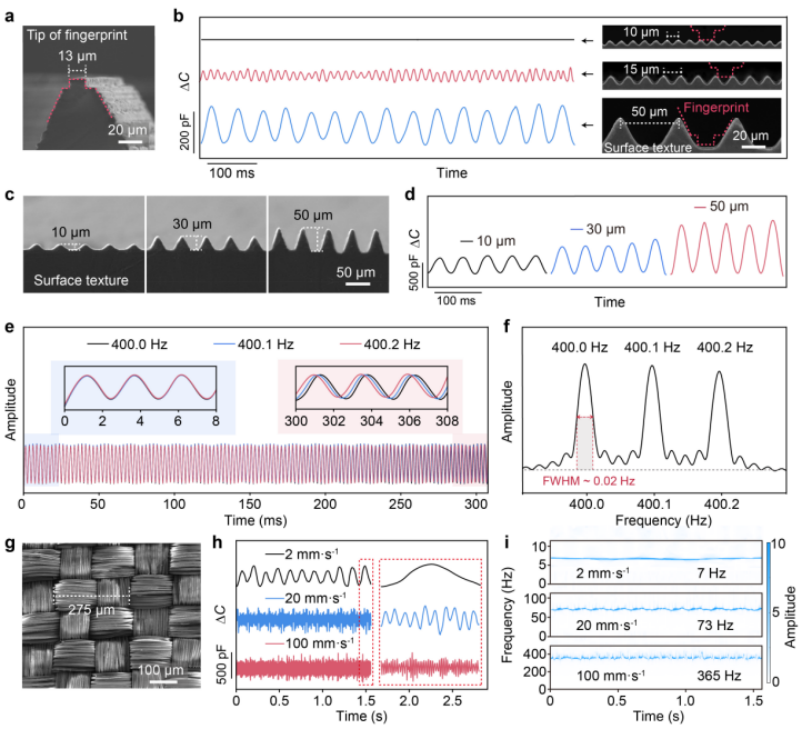 图3. 滑觉传感器的时空分辨率。a. 人工指纹的SEM图;b. 滑觉传感器对具有不同间距微结构的响应(滑动速度1 mm·s-1);c.高度不同的微结构的SEM图;d. 滑觉传感器对具有不同高度微结构的响应(滑动速度1 mm·s-1);d. 滑觉传感器与图 (c) 中的精细结构相互作用产生的信号;e.传感器检测到频率为400.0、400.1 和 400.2 Hz 的振动时域信号和(f)对应的频率信号;g. 被识别织物的微观形貌图;传感器在不同滑动速度下滑过织物表面时采集的(h)时域信号和(i)对应的频域信号。
图3. 滑觉传感器的时空分辨率。a. 人工指纹的SEM图;b. 滑觉传感器对具有不同间距微结构的响应(滑动速度1 mm·s-1);c.高度不同的微结构的SEM图;d. 滑觉传感器对具有不同高度微结构的响应(滑动速度1 mm·s-1);d. 滑觉传感器与图 (c) 中的精细结构相互作用产生的信号;e.传感器检测到频率为400.0、400.1 和 400.2 Hz 的振动时域信号和(f)对应的频率信号;g. 被识别织物的微观形貌图;传感器在不同滑动速度下滑过织物表面时采集的(h)时域信号和(i)对应的频域信号。
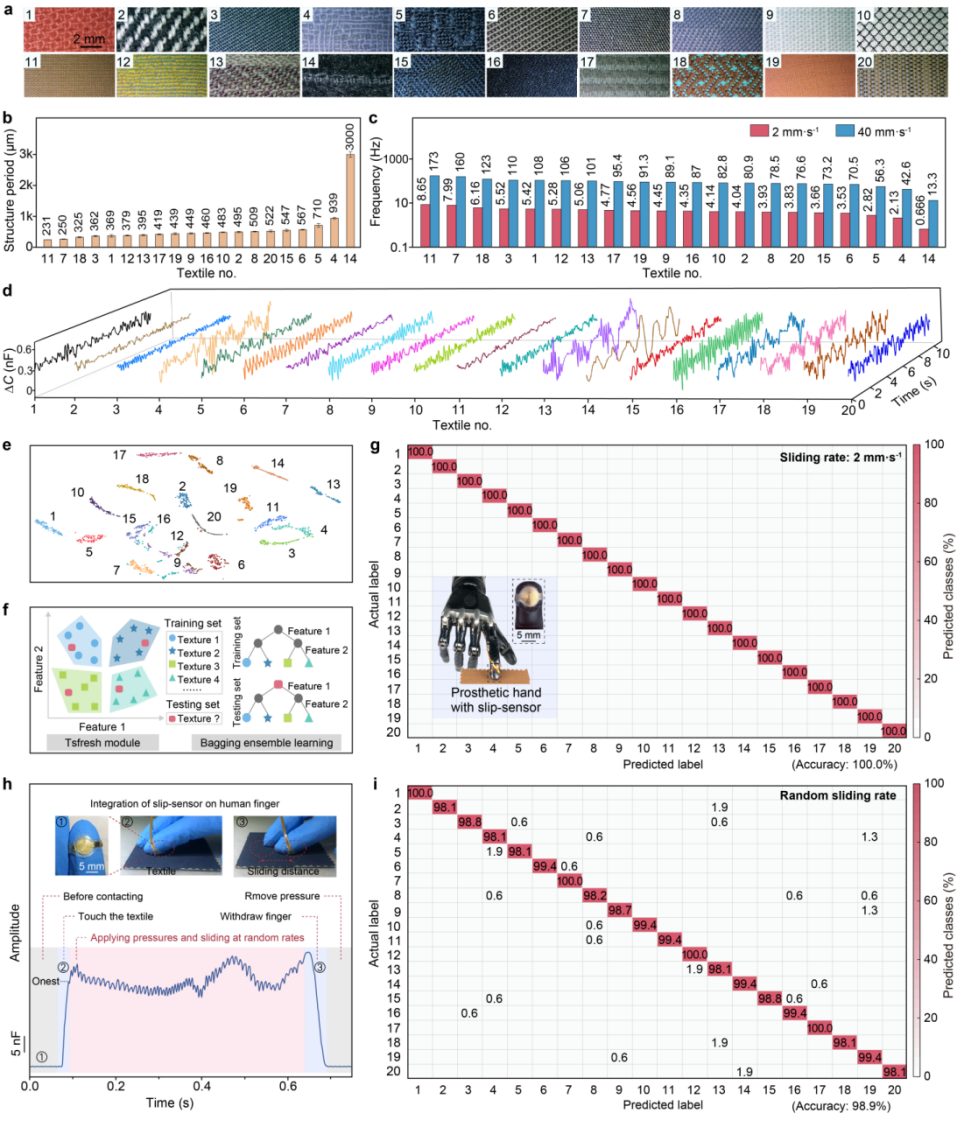 图4. 织物识别应用。a. 20种不同纺织品;b. 20种纺织品的结构周期;c. 20种纺织品在2 mm·s-1和40 mm·s-1滑动速度下的对应产生的特征频率;d. 滑移传感器以2 mm·s-1的滑动速率检测20种纺织品的时域信号;e. 数据集的降维可视化;f. 特征提取和信号分类示意图;g. 固定滑动速度下的识别准确率;h. 随机滑动速度下传感器滑过16号织物时的时域信号;i. 随机滑动速率下的识别准确率。
图4. 织物识别应用。a. 20种不同纺织品;b. 20种纺织品的结构周期;c. 20种纺织品在2 mm·s-1和40 mm·s-1滑动速度下的对应产生的特征频率;d. 滑移传感器以2 mm·s-1的滑动速率检测20种纺织品的时域信号;e. 数据集的降维可视化;f. 特征提取和信号分类示意图;g. 固定滑动速度下的识别准确率;h. 随机滑动速度下传感器滑过16号织物时的时域信号;i. 随机滑动速率下的识别准确率。
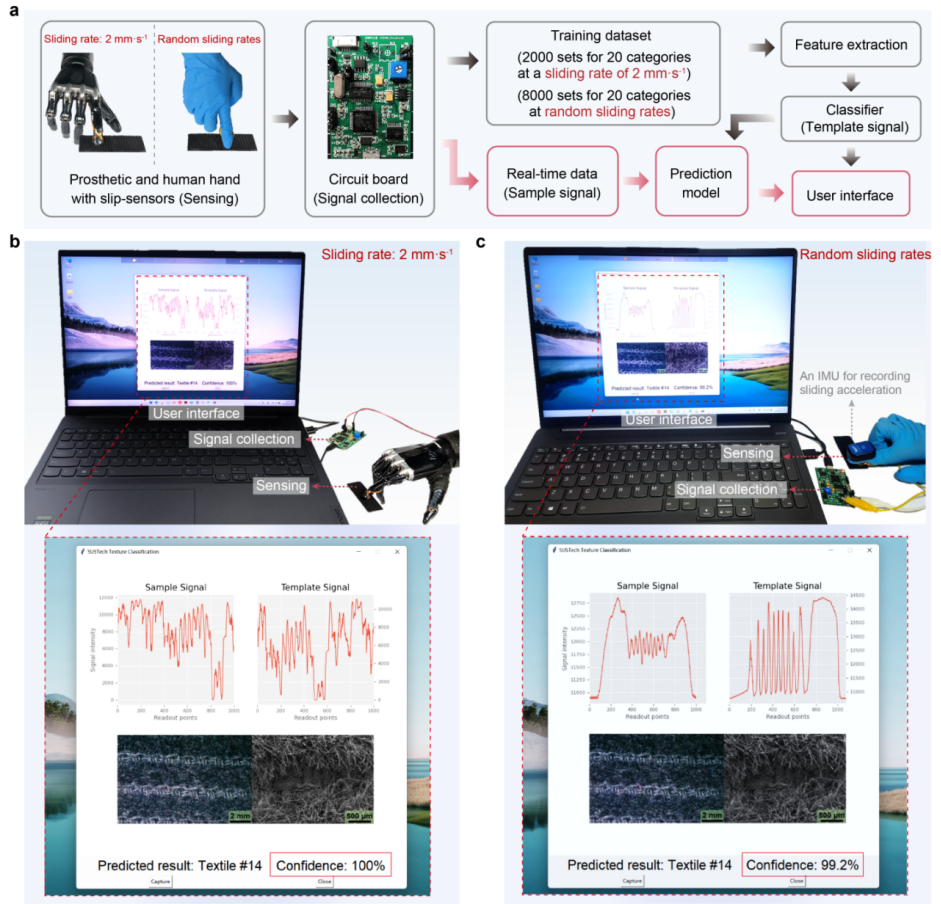
图5. 具有可视化用户界面的便携式实时传感系统。a. 实时传感系统的结构;b. 固定滑动速度下,实时纹理触觉识别系统的演示(传感器集成在机械手上);c. 随机滑动速度下,实时纹理触觉识别系统的演示(传感器集成在手指上)。
原文链接:
https://doi.org/10.1038/s41467-023-42722-4