清华大学张明君和徐静团队《Science Advances》:肠道“微针”机器人
发布日期:2024-01-17
浏览量:1116次
纵观人类药物治疗的历史,口服给药因其操作要求低、患者依从性高而一直是首选的给药途径。然而,大多数生物药物(肽、蛋白质、核酸和抗体)一旦暴露在严酷的胃肠道生化微环境中就很容易失活,并且由于胃肠道的保守吸收选择性,药物无法通过粘液或细胞层转运。因此,生物制剂药物的口服可用性有限(约为 1%),必须进行肠外注射,这不可避免地会引起疼痛和皮肤感染,往往导致患者依从性差,尤其是慢性病患者不得不经常进行治疗性注射。虽然目前的口服给药技术,如粘液粘附贴片、常驻水凝胶、微装置和基于颗粒的平台等已在公开文献中被提出,以提高生物药物的局部浓度并延长释放期,但其生理障碍仍然存在,临床疗效仍有待验证。如何克服生物药物口服给药的困境并提高患者的依从性仍然是一个巨大的挑战。
受到刺豚(porcupinefish)自我膨胀和展开刺进行防御的能力的启发,来自清华大学的张明君和徐静团队开发了一种肠道微针机器人,其设计目的是吸收肠液进行快速膨胀,并将装载药物的微针注入无知觉的肠壁进行给药。达到平衡体积后,微针机器人会利用有节奏的蠕动收缩来穿透粘膜。然后,机器人的倒钩微针可在蠕动松弛时脱离本体,保留在粘膜中以释放药物。由 14 只小猪参与的大量体内实验证实了肠道蠕动对微型机器人驱动的有效性,并证明了与皮下注射相当的胰岛素输送效果。可摄取的蠕动微针机器人可能会改变目前主要依赖肠外注射的生物药物口服给药方式。相关工作以题为“Pain-free oral delivery of biologic drugs using intestinal peristalsis–actuated microneedle robots”的文章发表在2024年1月5日的国际顶级期刊《Science Advances》。

1. 创新型研究内容
在自然界中,六斑刺鲀(Diodon holocanthus)在受到威胁时会通过吸水迅速膨胀。在这一过程中,刺豚身体上的硬刺和锥形刺会竖立起来,增大体型,并在被吞食时刺伤敌人(图 1A 和 B)。可以想象,由刺豚启发的可膨胀微针装置可以迅速膨胀体积,向肠壁伸出装载药物的微针,利用肠蠕动时的蠕动力穿透肠粘液层,输送生物药物。同时,某些刺类生物的刺上长有突出的倒钩,以增强穿透后对组织的粘附力。这种机制会产生一种带倒钩的微针结构,这种结构可以从微针装置中分离出来,并保留在组织中,从而实现药物输送和持续释放。
本研究设计了一种受刺豚启发的肠道蠕动微针机器人,以协助生物药物的艰苦口服给药(图 1A 和 B)。为了打破药物吸收障碍,本研究设计了微针机器人,使其在肠液中膨胀成一个大的刺囊,并在蠕动收缩时将微针注入粘膜(图 1F)。微针上装有装载药物的钩刺,钩刺可在蠕动松弛时从微机器人本体分离并串入粘膜以释放药物。与已报道的弹簧/气球发射或场控驱动机制不同,本研究提出的微机器人装置通过质量传输(吸收肠液)和固有肠蠕动发挥作用,无需预置能量或实时外部能量输入,即可将药物送入管壁。微针机器人(图 1F)主要由三部分组成:(i) 负载药物的倒钩微针,用于穿透粘膜并保留以持续释放药物(刺,图 1C);(ii) 可拉伸的基底膜,用于负载微针并抵抗持续蠕动收缩(皮肤,图 1D);(iii) 超吸收水凝胶颗粒,用于提供膨胀应力以平衡膜张力并使装置膨化(腹部的水;图 1E)。在干燥条件下,可将单个微针机器人封装到商用 00# 肠溶胶囊中,使其在酸性胃液中保持完整,并在肠道中释放出来(图 1G)。暴露在肠液中后,微针机器人会迅速膨胀到平衡状态,达到所需的大小[与食品药品管理局(FDA)批准的 PillCam 相当,小于肠腔直径],拉伸的薄膜会受到压力,以支撑刺向肠腔壁竖起(图 1G 和 H)。由于容积效应,有节奏的肠蠕动收缩可将微针推入粘膜,而松弛过程可将装有钩刺和药物的尖端与微针机器人分离,并将装有药物的钩刺锁定在肠壁上(图 1l)。
使用微针机器人后对肠道组织进行的组织学分析表明,肠道组织恢复迅速,炎症反应有限。以胰岛素为模型药物,本研究验证了其在 60 分钟内的快速降糖效果,并在对小猪进行 4 小时体内观察期间将口服生物利用度提高到23.6%,大大高于目前生物制剂口服药物约 1%的生物利用度。这种由蠕动驱动的机器人可作为目前依赖注射途径的生物制剂口服给药的多功能平台。
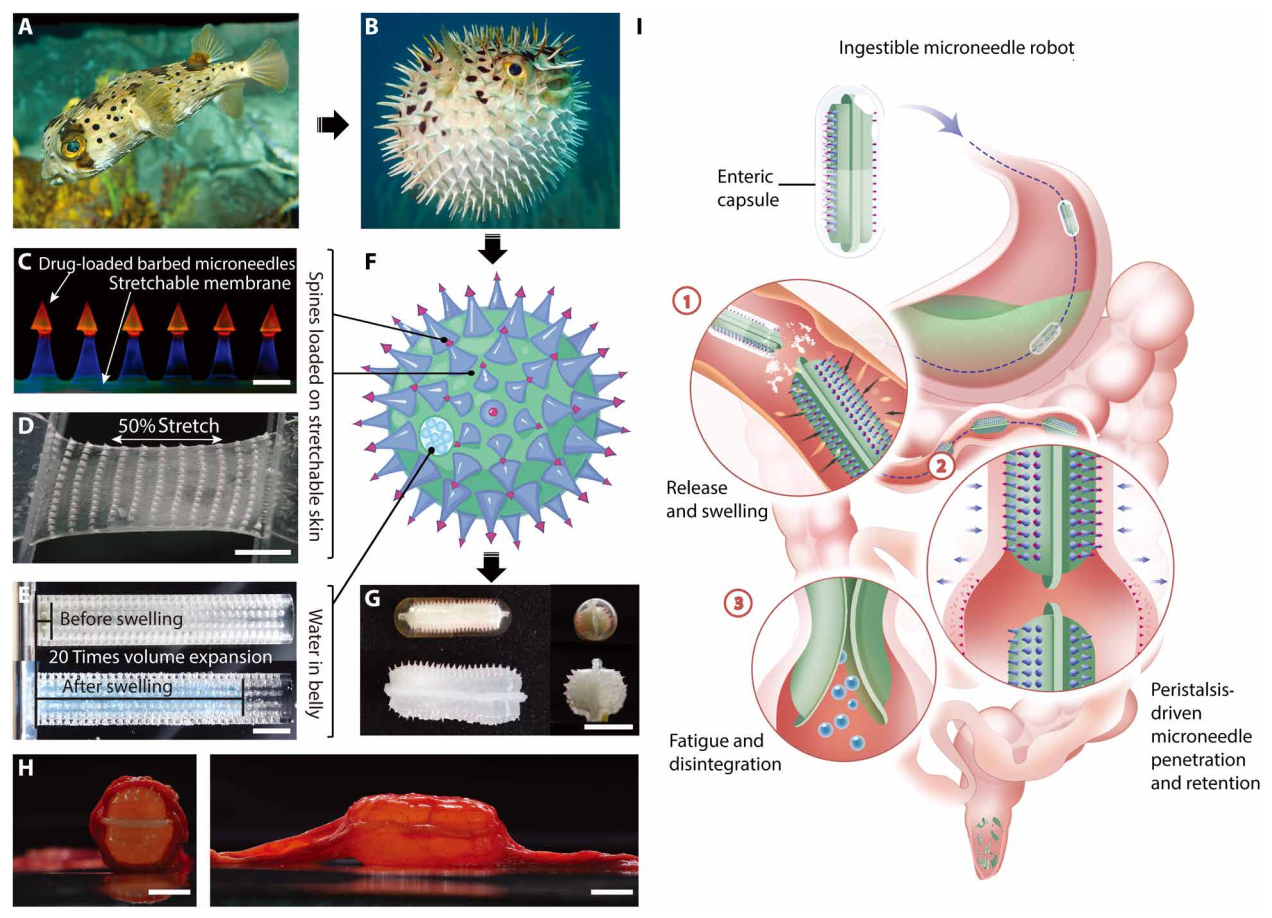
图1 受刺豚肠蠕动启发的微针机器人,用于口服输送生物药物
【微针机器人的构造和特性分析】
为了利用微针机器人的蠕动收缩力进行驱动和微针穿透,微针机器人应具有可膨胀性,以获得足够的蠕动压力,并将微针伸向肠壁。图 2A 是可膨胀微针机器人的构造过程示意图。微机器人的微针由聚乙二醇二丙烯酸酯(PEGDA)和聚乙二醇(PEG)的聚合物混合物通过模板辅助光交联法制成(图 2AI)。之所以选择 PEGDA 作为基质,是因为它具有公认的生物相容性和理想的机械强度。通常情况下,通过快速交联形成的 PEGDA 紧密网络的网眼尺寸较小,不利于药物释放(图 2C,左),而且用于微针-膜进一步连接的双键有限。为了克服上述问题,本研究添加了 PEG 作为稀释剂,以阻碍 PEGDA 的交联。低温扫描电子显微镜(cryo-SEM)显微图像证实,与不含 PEG 的网络相比,掺入 PEG 的 PEGDA 网络具有更高的孔隙率和更大的网孔尺寸(图 2C)。当掺入分子量为 4000 的聚乙二醇(PEG-4000)33 wt % 时,本研究证实嵌入荧光染料的药物在 3 小时内的释放率高达 50%(图 2D),这归因于松散的网络和亲水性 PEG 的溶解。本研究还考虑过使用其他生物相容性亲水聚合物,如聚乙烯醇(PVA)和聚乙烯吡咯烷酮作为稀释剂来调节药物释放速率。然而,这些材料与 PEGDA 混合后会出现快速相分离,这意味着水凝胶网络中的交联密度变得更难调节,促进药物释放的主要原因是亲水性聚合物的快速溶解。通过压缩试验(图 2E)测定,微针在弯曲前的机械强度至少为 30 mN/根,体内猪肠的穿透力为 2.5 mN/根。微针的机械强度随着 PEG 百分比和 PEG 分子量的增加而降低,这表明交联程度降低,肿胀程度增大也证明了这一点。穿刺组织的组织学检查显示,微针成功穿透了肠壁粘膜(图 2F)。考虑到潜在的肠穿孔风险,本研究进行了多次穿孔测试,发现至少需要 50 mN 的力和向组织至少 4 mm 的位移才能导致组织穿孔。这些结果证明了 PEGDA/PEG 微针的坚固性,以及在蠕动收缩压力下安全穿透组织而无穿孔风险。
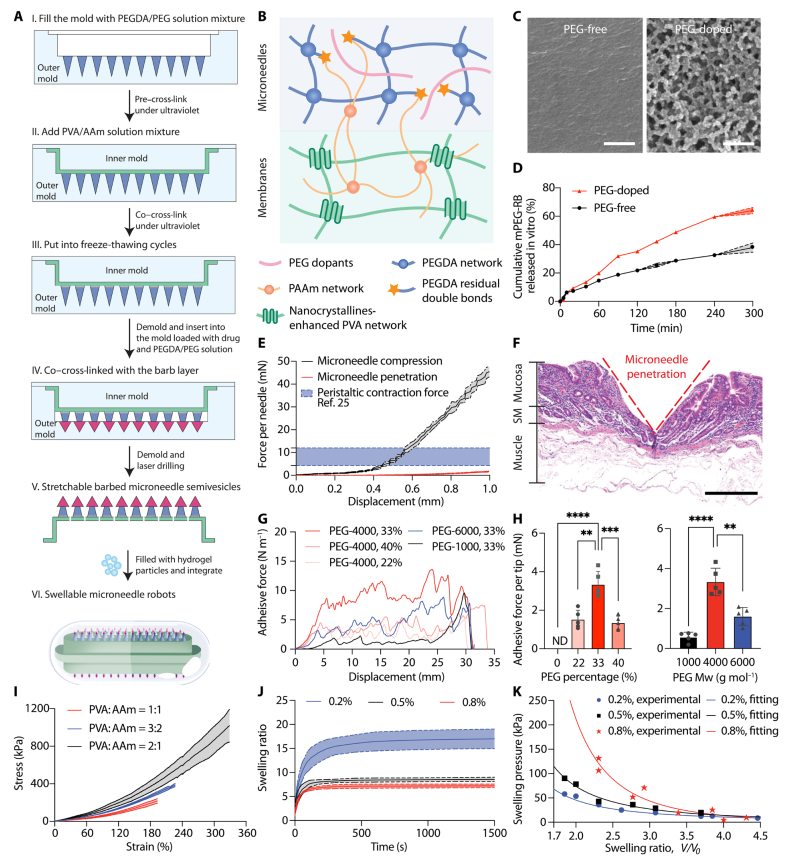
图2 微针机器人的制备和表征
【利用蠕动收缩促进粘膜穿透的可膨胀微针机器人】
鉴于肠蠕动的强度与食糜的大小呈正相关,膨胀平衡状态下机器人的体积可能决定作用于机器人的蠕动收缩力,从而影响药物微针的穿透效果。为了优化微针机器人的尺寸,本研究选择了胃肠道解剖和生理结构与人类相似的巴马小猪作为体内动物模型,进行肠道测压和微针穿透评估。如图 3A所示,本研究通过胃镜将一系列定制设计的不同直径的压力传感器送入小肠,实时测量体内的蠕动压力。为了消除环境压力,本研究在胶囊状压力传感器的轴向和径向两端都安装了压力测量单元,得出的压力差就是肠蠕动压力(Pintestine)(图 3A)。图 3C 显示了通过直径分别为 10 毫米、12 毫米和 14 毫米的压力传感器测量的三只小猪 5 分钟的蠕动压力曲线摘录。对于每只小猪,都观察到了主频率约为 10 cpm 的持续蠕动压力,非配对 t 检验显示,使用较大的传感器进行测试时,平均压力显著增加(图 3D)。由于蠕动压力来自肠道蠕动的冲力,因此假定在与传感器直径相同的微针机器人上施加相同的收缩力。每个微针(Fintestine)上施加的收缩力可由蠕动压力换算得出(图 3B)。计算结果表明,当微针机器人的直径达到14毫米时,单个微针上的Fintestine可能达到10.5 ± 1.3 mN,比文献中报道的所需穿透力高四倍(图3D)。这些数据表明,在小型猪模型中,增加机器人装置的径向尺寸可以增加作用在其上的蠕动压力,从而为微针穿透肠壁提供所需的驱动力。
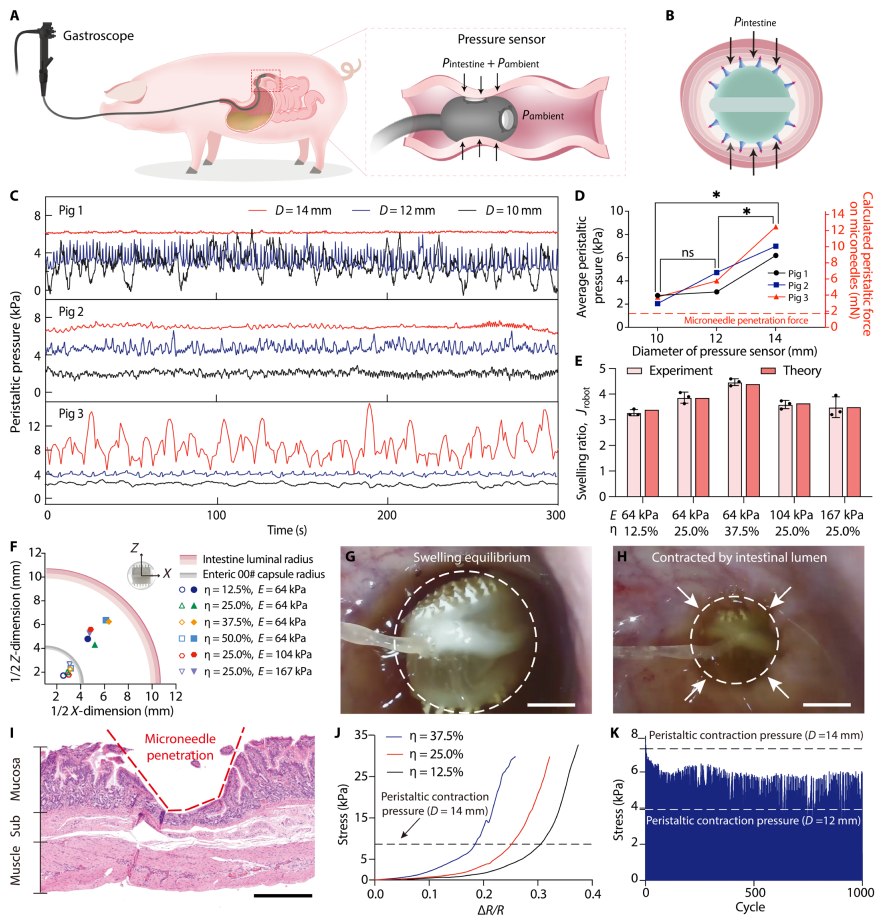
图3 通过蠕动收缩实现微针穿透
【利用蠕动松弛和倒钩结构促进粘膜保留的可膨胀微针机器人】
肠蠕动的节律性意味着它不仅包括强烈的收缩,还包括周期性的松弛(图 4A)。图 4B 显示了从蠕动压力曲线得出的三只小猪在 60 秒内的收缩-松弛交替情况。数据证实,在蠕动过程中,收缩和松弛阶段不断交替,双向方差分析(ANOVA)检验证实,在所有受试小猪中,松弛阶段在整个周期中所占的时间比收缩阶段长,据统计约占蠕动周期的 67.7%(图 4C)。然而,长时间的松弛期可能会导致载药微针脱离粘膜,暴露在恶劣的管腔环境中,最终降低给药效率(图 4A)。受某些刺痛生物难以拔出的倒钩刺的基本原理启发,本研究为微针构建了一种松树启发的倒钩结构,以增强微针与纤维组织的机械互锁,从而使倒钩微针难以从粘膜中拔出,并在蠕动松弛过程中易于从微针机器人上脱落(图 4D)。松树启发的钩刺微针是通过多轴向光固化工艺制成的(图 2A 和 4E),在此过程中,只需改变钩刺层数(nbarb)和两层之间的边长比(Lbarb),就能调节微针的回缩力(Fout)(图 4D)。同时,两层之间的连接力也会随着重叠高度的变化而变化。为了验证使用倒钩结构固定组织的可行性,本研究在活体猪小肠上测试了倒钩尖端的回缩力(图 4F)。与裸微针相比,带刺微针从组织中回缩需要 6.2 mN,而且回缩力随着 nbarb 和 Lbarb 值的增加而增加(图 4G)。
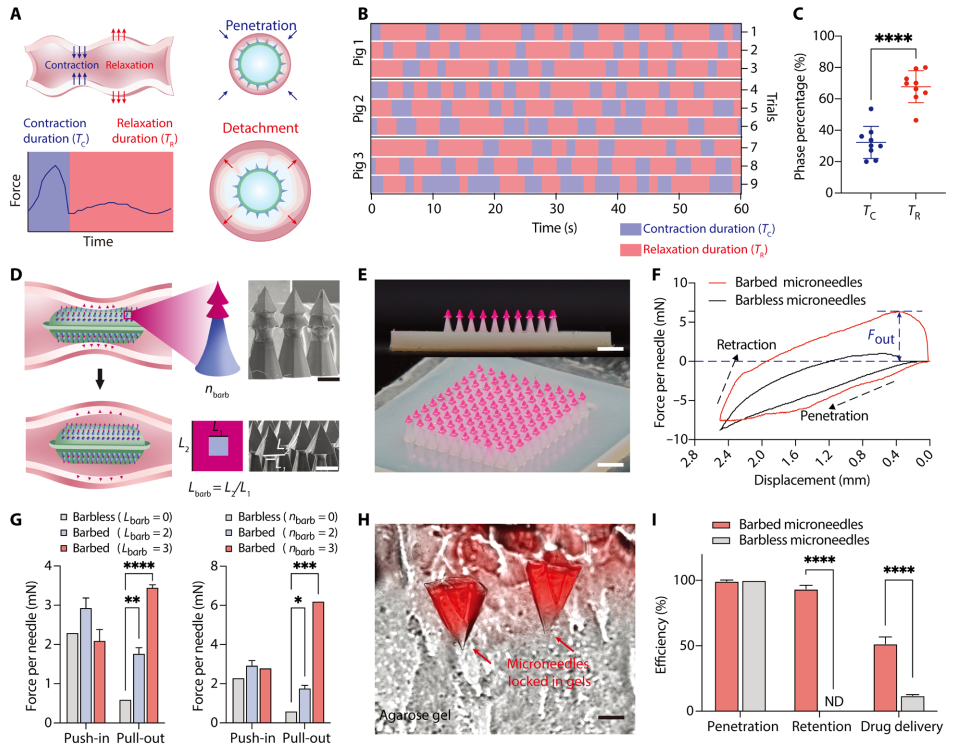
图4 通过蠕动收缩和放松保持微针
【体内给药的有效性和安全性】
为了观察微针机器人的口服给药和排泄途径,本研究首先将装有X射线造影剂的5个微针机器人经口腔注射到小鼠体内,并在透视下观察它们的胃肠道分布(图5A)。由于机器人足够小,可以装入商用 00# 肠溶胶囊中,因此在食道和胃中保持完整,并在胃排空后进入肠腔(图 5A,a 和 b)。通过实验,本研究观察到微针机器人的大小会影响胃肠道转运的效果。由于迷你猪模型的胃排空时间长达 24 小时,幽门狭窄,制备的 30 毫米长的微针机器人直到第五天才出现在肠道中,幽门通过时间长导致五个微针机器人中的四个被强烈的胃收缩挤压成碎片。为了让更多的微针机器人能够完整地进入肠道,本研究又制作了五个直径与第一批相同的 15 毫米长(第一批微针机器人长度的一半)的微针机器人,并进行了相同的输送实验程序。结果表明,较短的微针机器人比较长的微针机器人早一天(第 4 天)通过幽门,而且这五个微针机器人中有四个完全进入了肠道。进入肠道后,微针机器人开始膨胀并与肠道相互作用(图 5Ab)。最后,微针机器人在持续的蠕动收缩下被挤压粉碎(图 5Ac),较短和较长的微针机器人分别在第 6 天和第 7 天完全排出胃肠道(图 5Ad)。这些数据表明,微针机器人可以通过胃肠道,其大小影响了通过时间以及进入肠道发挥功能的能力。考虑到人的胃排空时间比小猪快,幽门比小猪大,微针机器人可以进行进一步的优化,以更短的时间穿过人的胃肠道,使其在人胃内不易被破坏,这是与小猪胃相比的一个优势。
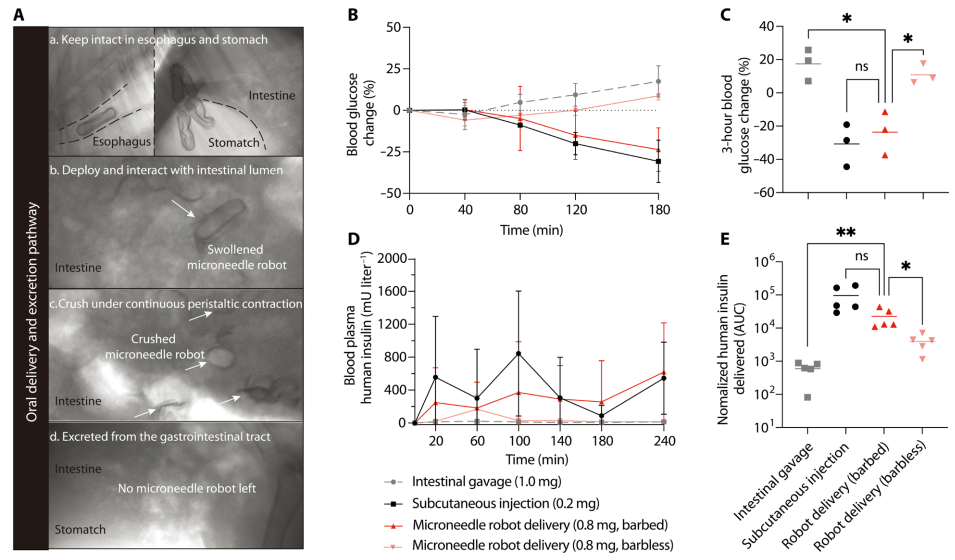
图5 在小型猪体内给药
为了验证微针机器人的给药效果,本研究进一步将人重组胰岛素注入微针机器人,并在体内放置4小时后测量了小猪血糖和血浆药物浓度的变化。为了避开较长的胃排空时间并确定观察起点,本研究直接将微针机器人送入十二指肠,并在动物麻醉后使用胃镜持续观察。本研究的机器人给药方法(0.8 毫克)与皮下注射(0.2 毫克)和肠道灌胃(1.0 毫克)胰岛素溶液进行了比较。在取样期间,机器人给药法在 180 分钟内实现了 23.6 ± 10.7% 的血糖下降,与皮下注射法 30.7 ± 10.4% 的下降幅度相当(n = 3)。肠道灌胃组血糖下降不明显,但在 40 分钟后略有上升(图 5B 和 C)。与观察结果一致,药代动力学研究显示,机器人给药法实现了与皮下注射相当的大剂量胰岛素给药,其相对生物利用度达到 23.6%(n = 5),是肠道灌胃组(0.6%,n = 5)的 37.7 倍(图 5D 和 E)。
2. 总结与展望
本研究开发了一种非常规的肠道蠕动微针机器人,并在小猪体内演示了其用于肠道微注射和口服给药的可行性。受刺豚在受到威胁时的膨胀和刺痛防御行为的启发,微针机器人可以通过吸收肠液膨胀成体积增大的刺囊,并利用径向蠕动收缩将装载药物的微针推入肠壁。微针机器人的平衡容积经过优化,既能为微针穿刺提供足够的蠕动压力,又能避免造成肠梗阻。与强烈的一次性给药模式相比,适度和重复的穿刺过程确保了较高的给药可靠性,并能有效减少穿刺失误和穿孔风险。带倒刺的微针结构使药物微针在插入后很容易与机器人本体分离,并在蠕动松弛过程中促进微针在肠壁的保留。在小猪体内进行的给药实验表明,胰岛素具有明显的降血糖作用,生物利用率高达 23.6%,超过了典型生物制剂口服给药的生物利用率,在迄今为止公开文献报道的胰岛素肠内给药机器人(约 10%)中名列前茅。
文章链接:
https://www.science.org/doi/10.1126/sciadv.adj7067
文章来源:EngineeringForLife