超酷!UCLA郑小雨教授Science:3D打印机器人超材料,可以感知环境、自主导航!
发布日期:2022-07-01
浏览量:2025次
随着人工智能技术的进步,智能机器人产业如雨后春笋般蓬勃发展。实际上,“机器人”一词最早出现在1921年卡雷尔·卡佩克(KarelCapek)创作的一部科幻剧中。
目前大多数机器人,无论其大小,通常都是通过一系列复杂的制造步骤构建的,这些步骤集成了肢体、电子和有源组件。与用提供不同功能的独立部件来建造机器人相比,用多功能超材料建造的机器人具有一定的优势。超材料是一种由重复图案组成的合成结构,旨在表现出理想的宏观特性。与大宗材料不同,超材料的行为受其工程结构的制约,而不是纯粹由其材料构成驱动。增材制造技术,如3D打印,已经加速了复杂的超材料的制造,其规模越来越小,功能也前所未有。传统上,制造机器人依赖于组装离散的执行器、传感器、微处理器和电源。机器人超材料通过在超材料的周期性结构中构思自主性来挑战这种模式。
从历史上看,超材料的研究主要集中在光学应用上,例如具有超出普通透镜和反射镜能力的可调谐光学特性的超材料。然而,近年来,研究人员越来越多地转向在其他领域采用这种设计原理。比如无需使用传动齿轮即可将线性运动转换为旋转的机械超材料,或能够按需调整刚度或变形等体积特性的镶嵌机器人群。创造机器人超材料的另一条途径是在结构中体现“机器人任务”。例如,人们可以设计一种超材料,其变形可以通过电信号进行控制。
鉴于此,最新一期《Science》期刊在线发表了加州大学洛杉矶分校的郑小雨教授团队的新成果。该团队开发了一种新的设计策略和 3D 打印技术,可以一步构建机器人。第一作者为崔华晨。
具体而言,作者开发了一种合理设计压电超材料的方法,该材料由无源、压电有源和导电相组成,可以执行一些机器人任务(Figure1)。所需的变形模式,例如扭曲,近似为一些通过结构的离散平面的运动。反过来,这些平面的允许运动将告知结构相、致动器和电极应如何在压电超材料内组织以产生目标运动。在经典的弹性理论中,弹性材料的变形以拉伸、压缩和剪切为特征。本文作者应用了微极弹性,通过在平移之上结合旋转来扩展经典弹性。这种方法能够更全面地评估压电超材料的宏观膨胀、剪切、扭曲和弯曲对其微结构、极化和施加的电场。
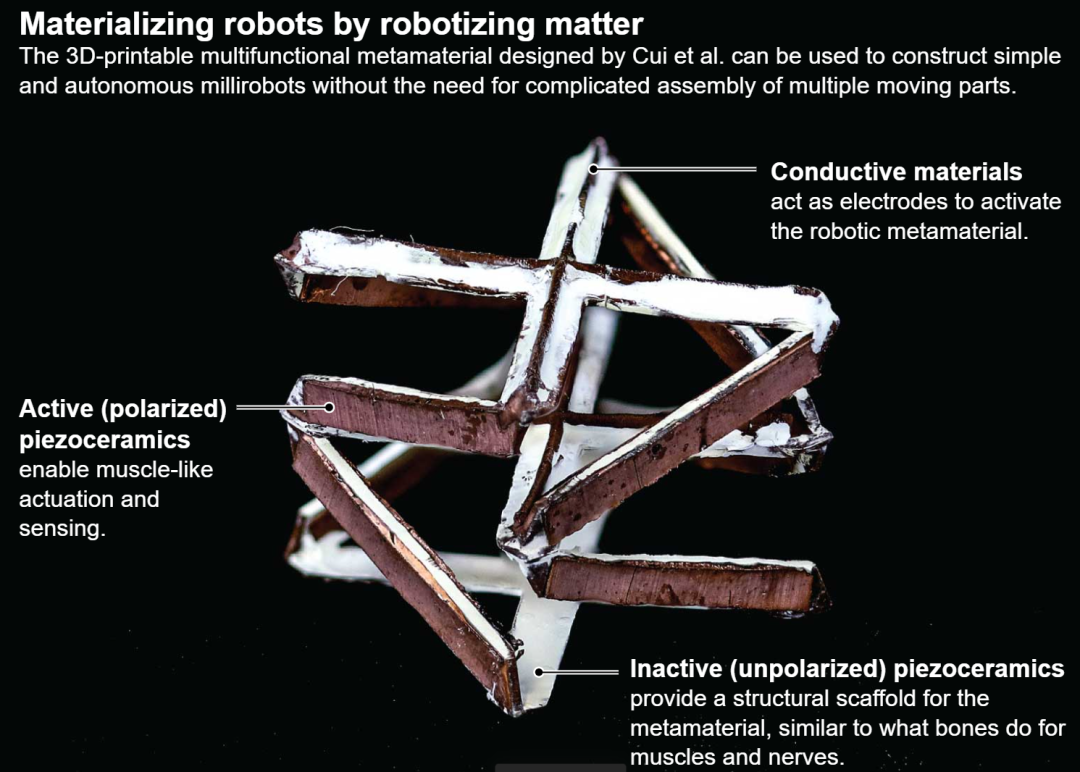
Figure 1. 示意图
【实验设计】
架构材料的核心概念是在 3D 单元拓扑中不受限制地放置材料,绕过天然晶体固有的限制或模仿它们以实现所需的特性。为此,作者引入了一种方便且强大的策略来构建 3D 空间中的压电活性、导电和结构相(图 1A)。因为现有的压电张量不足以描述所有的自由度,作者在 Cosserat 固体的基础上定义了广义压电张量来描述架构压电材料的应变转换(图 1B)。微结构的具体结构(晶胞)如图1C-1K所示。
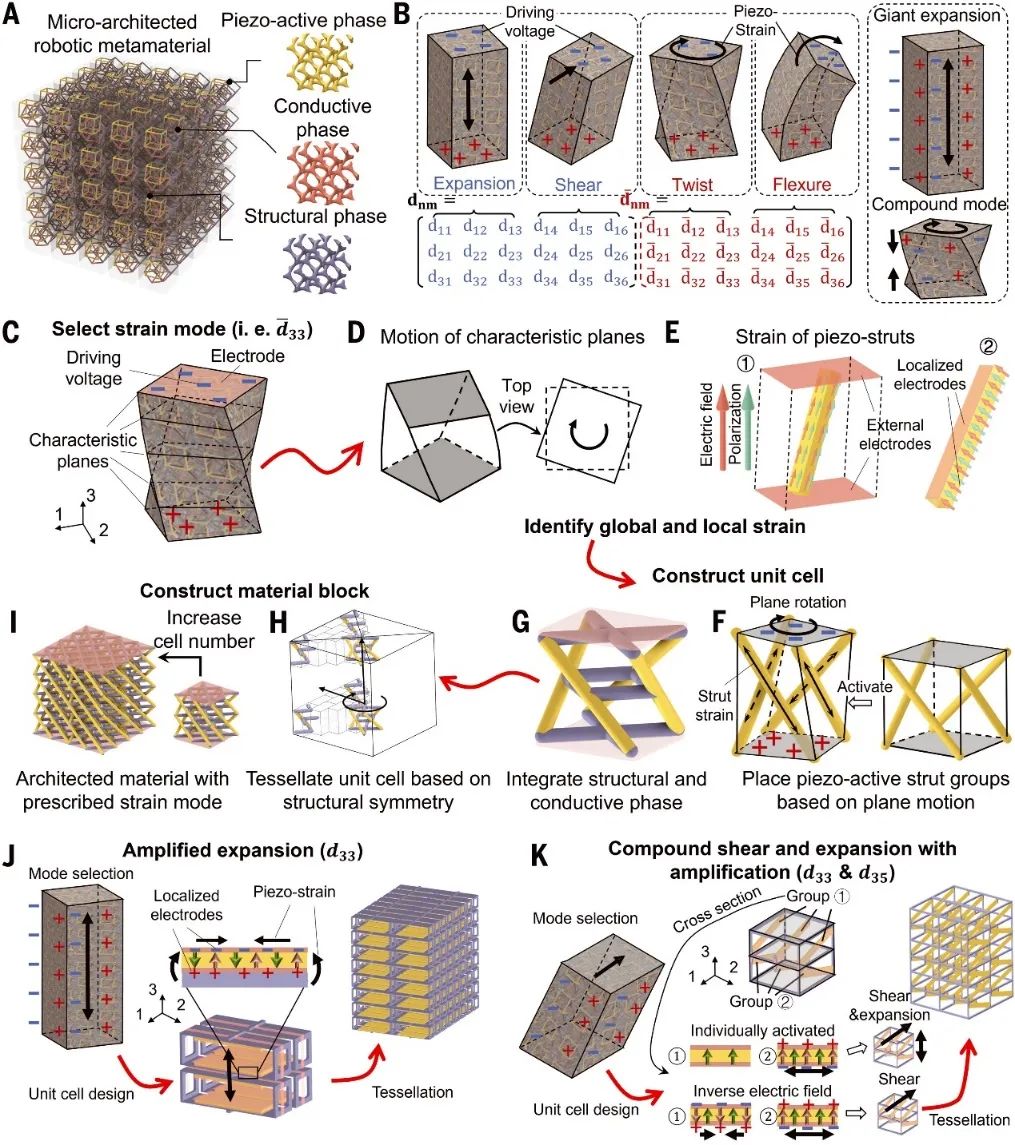
图 1. 具有任意应变模式的机器人超材料的合理设计
【机器人超材料的增材制造】
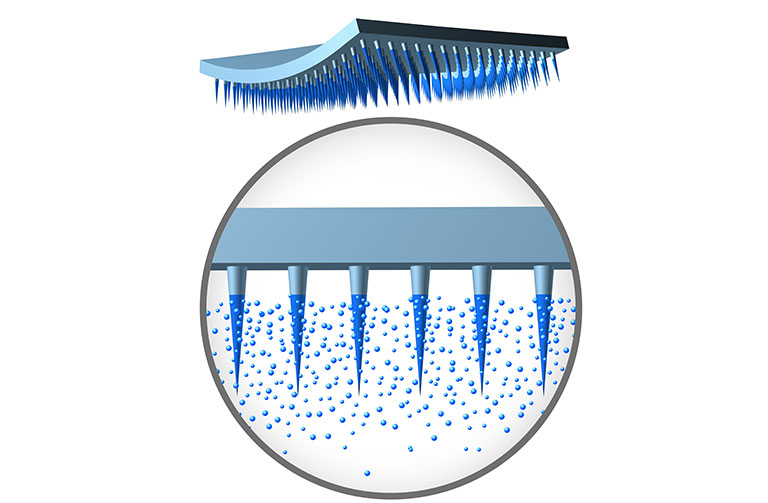
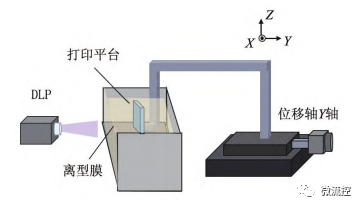
作者开发了一种电荷程序化多材料增材制造技术,能够将压电活性相、结构相和导电相组装成复杂的3D微架构。首先,通过多材料3D打印系统(材料和方法)打印带负电荷的树脂和高负载的纳米粒子胶体,如图2A所示。然后将导电相选择性地沉积在带电树脂上,形成带有电极的 3D 微架构(图 2B)。此外,氧化铅用于提供液体密封和富铅环境,以抑制 PZT 在高于 800°C 的温度下的铅蒸发(图 2D)。这种 3D 制造方法允许制造具有精确、微尺度 3D 结构和低孔隙率的压电活性材料(图 2E-2H)。总之,作者使用具有空间编程静电荷的多材料立体光刻系统,并在选定区域制造了装饰有导电金属和压电特性的3D陶瓷晶格。
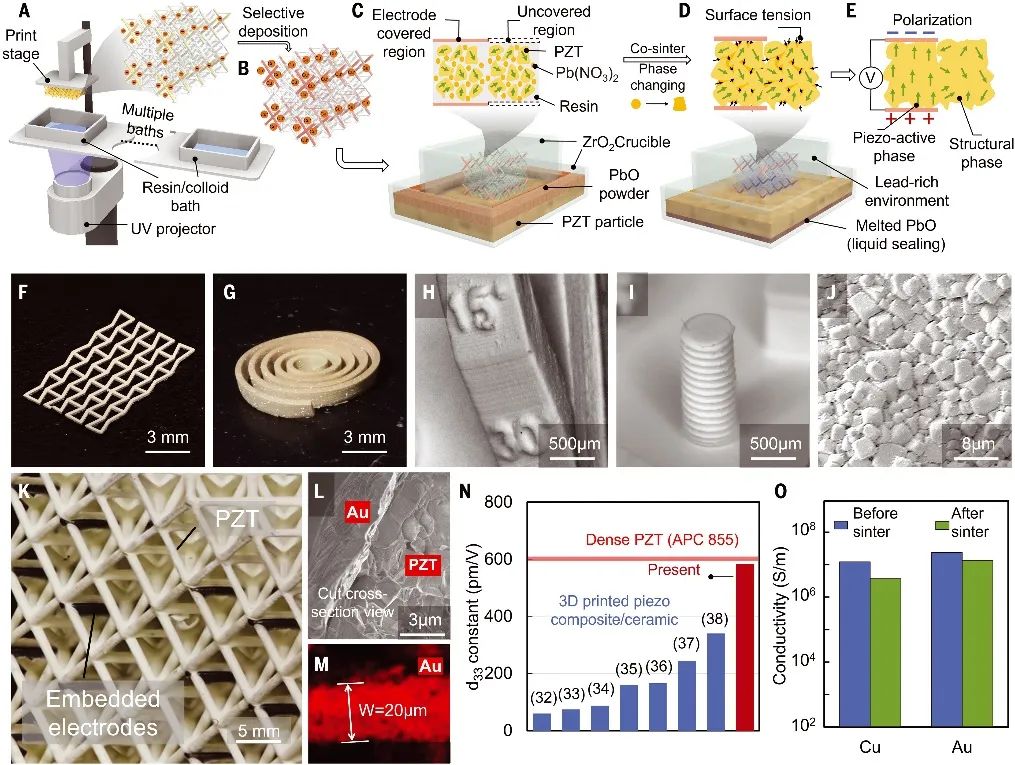
图 2. 多材料制造平台
【多自由度放大和程序化应变】
由增材制造的机器人超材料可以使用电场到机械应变的双向转换来产生运动和传感。逆压电效应赋予机器人驱动能力,而直接和双向压电效应分别通过本体感受(自我监测)和外感受(接触检测和遥感)实现反馈控制。超材料的拓扑结构允许将电极直接放置在压电活性支柱上,从而产生更强的电场并放大驱动应变。
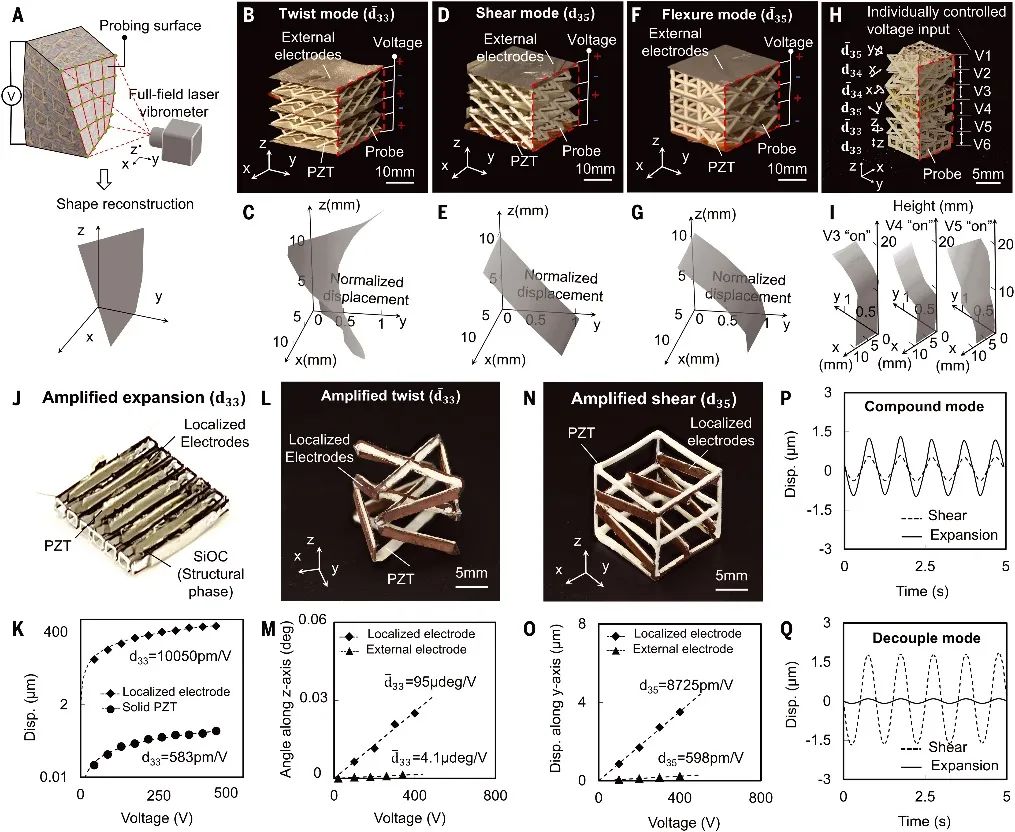
图 3. 机器人超材料设计的实验验证
同时,作者巧妙地将驱动和感知交织在一个轻巧的微型复合3D格子中,该格子可以四处移动并感知周围环境。然后,作者通过设计板载控制系统和电源,朝着不受束缚的实施迈出了一步。这种系统级集成虽然很少见,但可以充分挖掘现实世界场景中快速发展的机器人材料的全部潜力,并找出它们的缺点。考虑到这里讨论的移动压电超材料,压电活性元件的布线仍然是增强其多功能性的限制因素,而分配功率和分散控制仍然是需要克服的障碍。尽管存在这些限制,但作者证明,当移动性和不受约束的自主性不是必需的时,一块压电架构可以用作具有六个自由度的紧凑型3D打印机械手,即能够沿所有三个轴平移并围绕所有三个轴旋转。
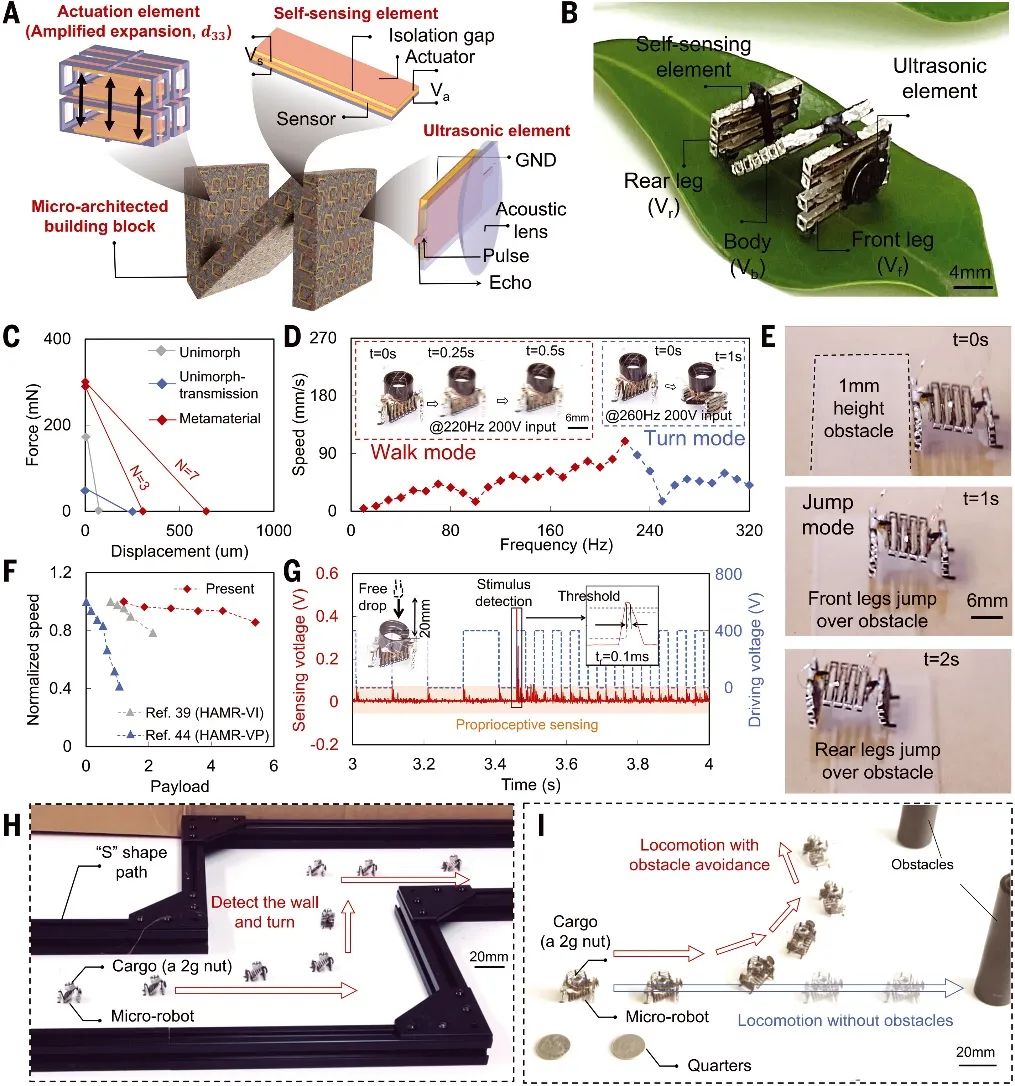
图 4. 刺激响应多模式移动微型机器人
自主感知、导航机器人
【作者简介】
加州大学洛杉矶分校的Xiaoyu (Rayne) Zheng教授课题组从力学、光学和材料科学中汲取原理,开发下一代增材制造(3D打印)工艺、材料设计和合成方法,以创造具有可控拓扑结构、成分和多尺度特征的多功能材料和一体式设备。该课题组积极地将这些材料转移到电子、结构、机器人、能源储存和传导、到生物和保健的广泛应用中。Xiaoyu (Rayne) Zheng教授课题组在超轻、超强和弹性材料的可扩展增材制造方法方面的工作被《麻省理工科技评论》的十大创新、《研发100》杂志、《科学》杂志和《自然材料》的封面所报道。
原文链接:
https://doi.org/10.1126/science.abn0090