北京航空航天大学蒋永刚课题组《Soft Robotics》:基于PμSL 3D打印技术制备的波形人工触须传感器用于不同流体的分析
发布日期:2022-05-20
浏览量:1677次
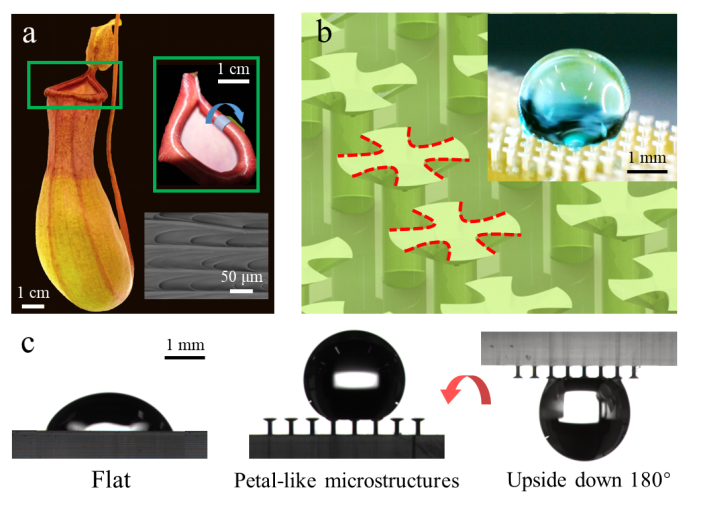
近年来,随着无人水下航行器和软体机器人的发展,微型柔性流量传感器已经成为姿态控制和流场分析的关键器件。目前,仿生毛发流量传感器的灵感多来自昆虫的触角、海豹的触须。其中,仿生毛发流量传感器通常采用圆柱形结构,但是该类型的传感器会产生涡激振动,这种涡激振动会引发很大的噪音,并恶化流量传感器的信噪比。海豹可以通过触须识别、定位和追踪猎物。这种波形触须可以抑制涡激振动的产生、降低涡激振动引发的噪音。研究学者受海豹触须形态的启发制备了多种人工触须传感器。然而,这些传感器通常体积庞大、组装起来较为繁琐。因此,使用简单的制备工艺并优化传感器的结构以提高其灵敏度、使其微型化具有重要的意义。
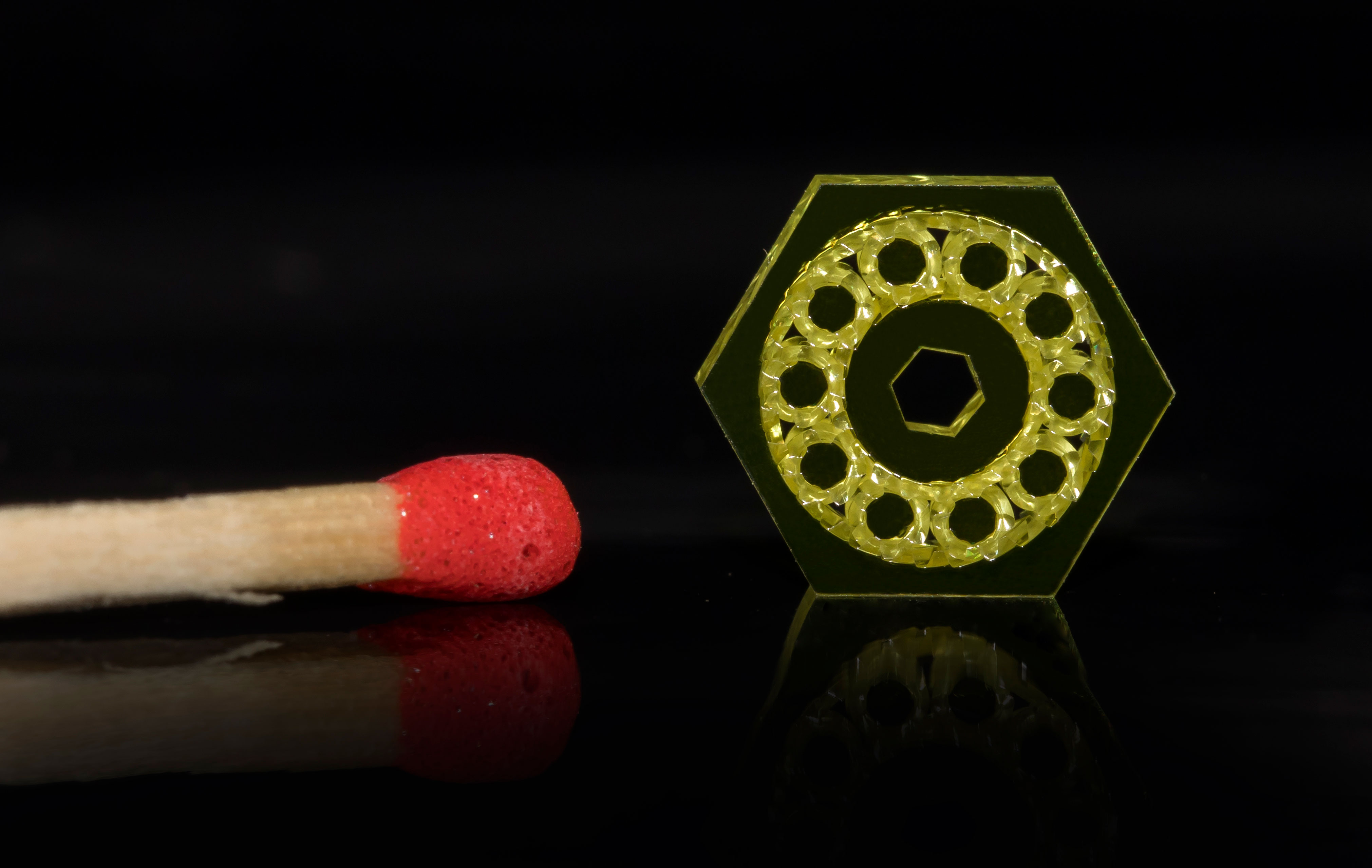
近日,北京航空航天大学蒋永刚课题组基于面投影微立体光刻(PμSL) 高精度3D打印技术结合PDMS浇铸工艺制备了波形人工触须传感器,该传感器可以用于不同流体的分析。人工触须传感器由仿生触须和带有压阻传感器的PDMS基座组成;PDMS基座上集成有4个微通道,并采用定向液体扩散(DSL)方法将碳纳米管/银纳米颗粒(CNT/AgNPs)墨水注入微通道中,以形成压阻传感器。研究人员基于PμSL (nanoArch S140高精度3D打印系统,摩方精密) 3D打印技术制备了仿生触须和两个用于制备PDMS基座的模具。仿生触须长35mm,表面呈现波浪形,截面呈现椭圆形,几何结构呈现非对称性;打印模具的链状凸台结构宽度为200μm,高度为80μm,其中,凸台上对称菱形组成的结构高度为30μm。
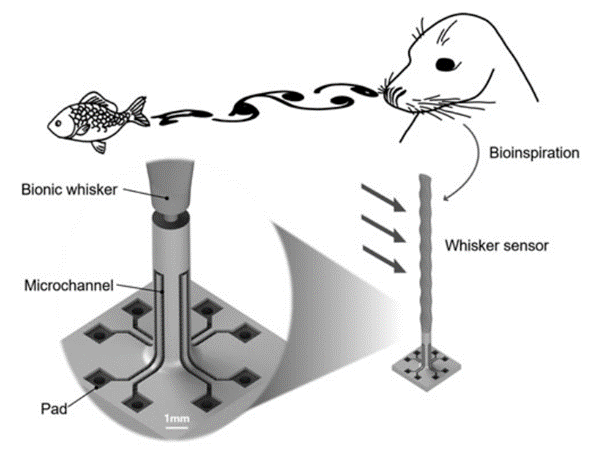
图1. 人工触须传感器的结构示意图
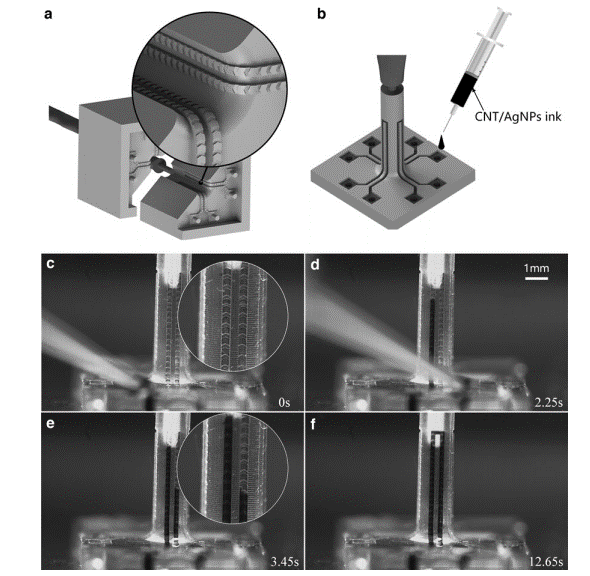
图2. 人工触须传感器的制备。其中,a图是基于PμSL技术制备的仿生触须和两个模具
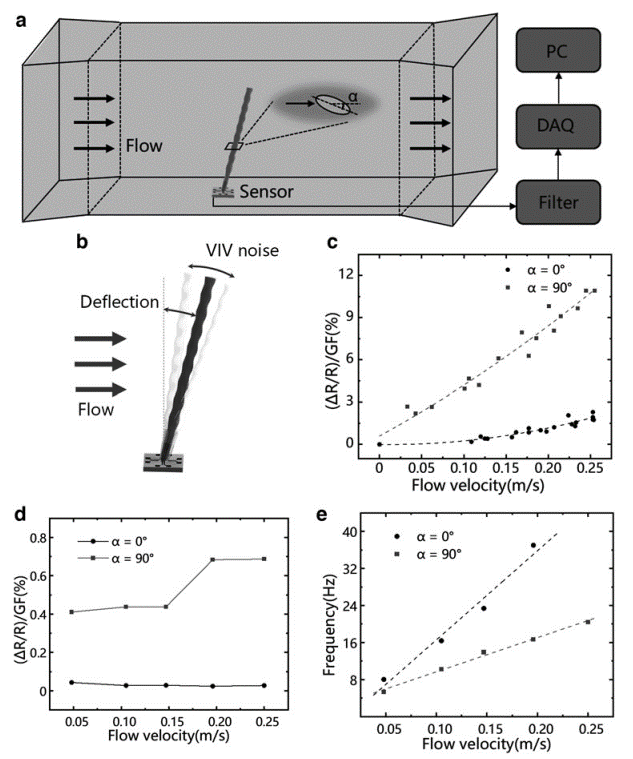
图3. 稳态流场中人工触须传感器在不同流速下的响应
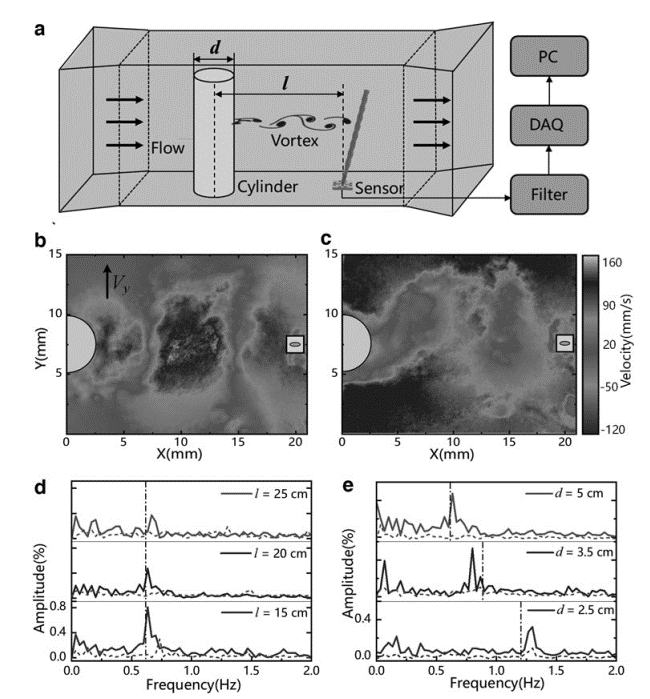
图4. 涡流检测的实验装置及结果
波形人工触须传感器对复杂的流体现象表现出极好的灵敏性,包括涡激振动、振荡流动和上游涡流尾迹。稳态流实验表明,在0°攻角下,人工触须的波形形态可以显著降低触须的阻力,抑制涡激振动的产生;振荡流实验表明,触须传感器可以检测振荡流流速,阈值检测限可低至8mm/s;另外,涡流检测实验表明,该波形人工触须传感器可以辨别上游圆柱诱导的各种涡流尾迹。该研究成果在智能流体分析方面具有巨大的应用潜力,以“Artificial Whisker Sensor with Undulated Morphology and Self-Spread Piezoresistors for Diverse Flow Analyses”为题发表在Soft Robotics上。
原文链接:http://doi.org/10.1089/soro.2021.0166