高精度3D打印 | 香港中文大学《ACS Nano》:3D打印小尺度机器人及其在血栓定位与加速溶栓的应用
发布日期:2022-01-25
浏览量:2289次
血栓症是一种常见的血管内疾病,具有多种临床表现和并发症,例如心梗、中风及肺栓塞等,严重危害病人的生命健康及生活质量。传统治疗方案常先通过注射溶栓药物或导管介入技术去除血栓,接着使用抗凝药物预防二次堵塞。然而溶栓药物缺乏靶向性,无法主动在血栓部位富集,且高浓度的药物易引发内出血和血压波动,因此难以高效安全地完成去除血栓的任务。导管介入技术则对操作者的经验和判断能力要求较高,操作不当容易损伤血管,甚至造成二次堵塞。近年来,小尺度机器人系统在狭窄闭塞的生物环境中展现出令人瞩目的应用前景,已有研究人员开发出可破坏血栓结构的微型机器人。然而,如何在动态血流环境中实现小尺度机器人的可控靶向递送和实时状态监测仍是一个巨大挑战,这极大地限制了它们在血栓治疗中的进一步应用。
近日,香港中文大学张立教授课题组王乾乾博士、杜星洲博士、金东东博士提出一种基于小尺度机器人的血栓定位及加速溶栓方案。螺旋形微机器人采用高精度3D打印工艺制造,采用动态磁场进行自动化递送,同时采用超声成像进行实时的机器人定位及环境监测。机器人能够实时定位血栓位置,并加速血栓的溶解。这项研究有望为血栓症的监测和治疗提供新的思路,同时也为小尺度机器人在生物医学领域的应用开辟道路。相关研究结果以“Real-Time Ultrasound Doppler Tracking and Autonomous Navigation of a Miniature Helical Robot for Accelerating Thrombolysis in Dynamic Blood Flow”为题发表于国际著名期刊《ACS Nano》。
该工作使用面投影微立体光刻技术(nanoArch S130, 摩方精密)打印了螺旋形微机器人,并预留磁性物质的嵌入空间。微机器人整体结构采用摩方精密提供的polyethylene glycol diacrylate(PEGDA)材料,机器人尺寸为直径2.15 mm、长度7.30 mm。实验结果显示,螺旋形机器人在血液环境及血流环境中表现出极好的结构稳定性,在溶除血栓任务结束后能保持完成的整体结构并被回收。该打印设计方案可根据需求进行尺寸缩放,以期应用于不同的狭窄生物环境中。
在机器人系统搭建完成后,研究人员在测试平台中验证了医学图像引导机器人递送、溶栓方案的可行性。通过实时监测机器人的运动状态以及机器人诱导产生的多普勒超声信号,研究人员在类血管复杂动态环境中成功实现血栓堵塞部位的定位。机器人在磁场驱动下能够产生强对流加速溶栓因子的物质交换,同时对血液-血栓界面施加剪切力促进溶栓产物的去除。实验结果表明,相对于单纯使用溶栓药剂,该方案可大幅提高血管的疏通效率(约4倍),完全溶栓率提高至350%,且不产生明显的血栓碎片,降低了二次堵塞的风险。配合不同尺寸的小尺度机器人,该方案可根据需要应用于不同直径的血管中,有望为外场驱动的小尺度机器人在生物医学领域的应用提供新的思路。
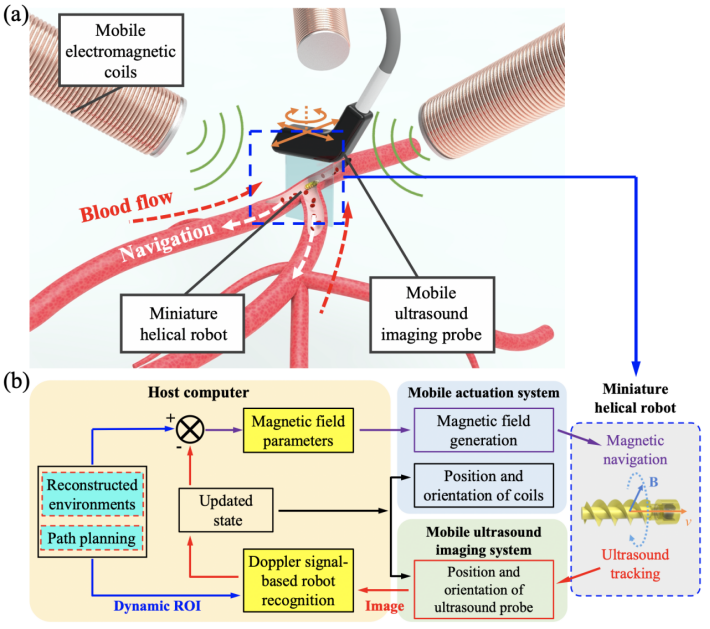
图 1.螺旋形机器人在动态、类血管环境中的自动化导航整体方案。
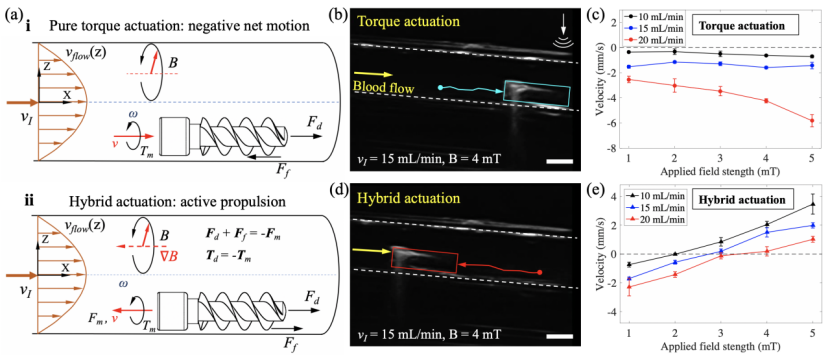
图 2.螺旋形机器人在血流环境中的受力分析及磁控。
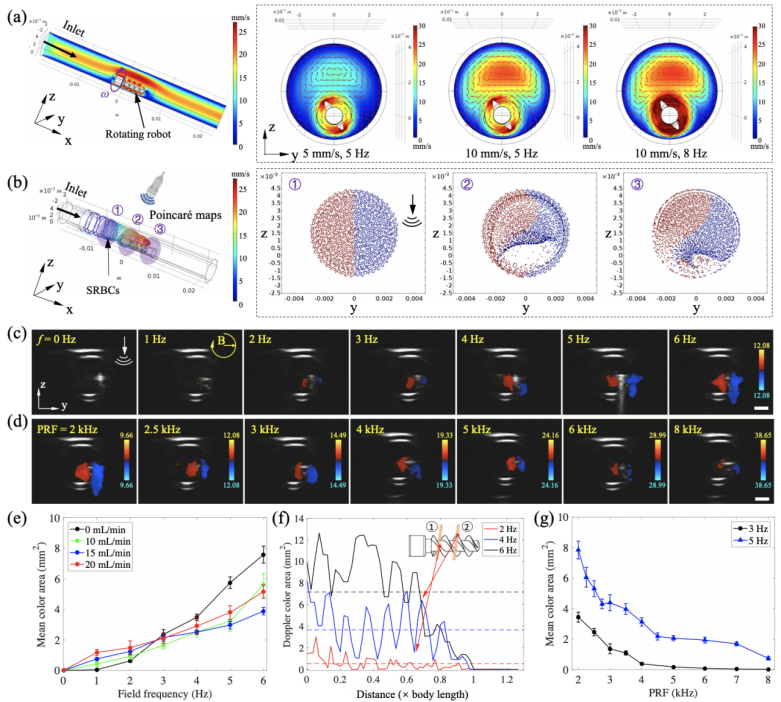 图 3. 机器人诱导的多普勒信号的仿真分析及实验验证。
图 3. 机器人诱导的多普勒信号的仿真分析及实验验证。
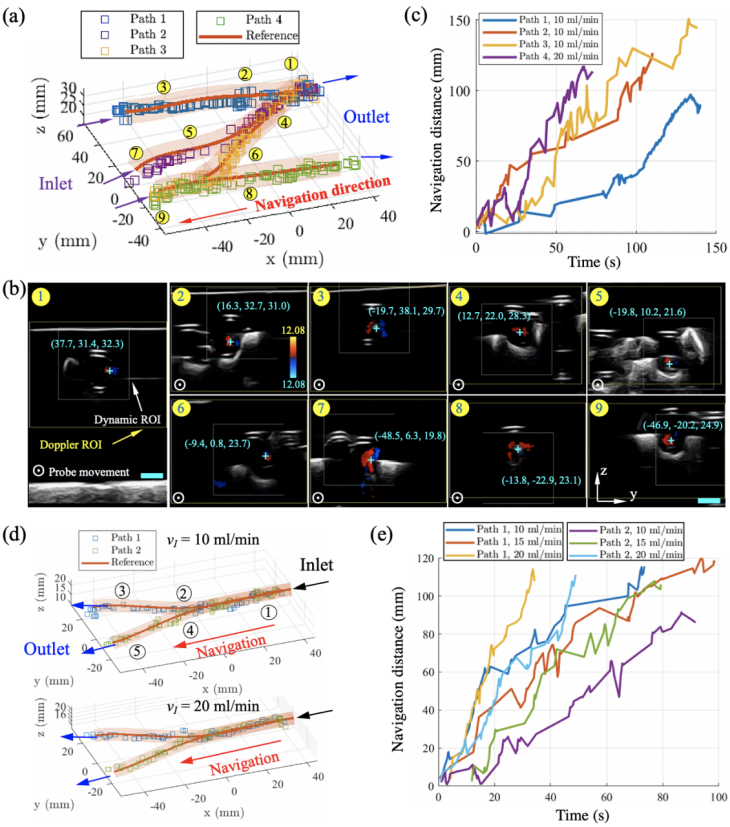
图 4. 机器人在类血管系统中的自动化导航(逆流而上及顺流而下)及实时定位。
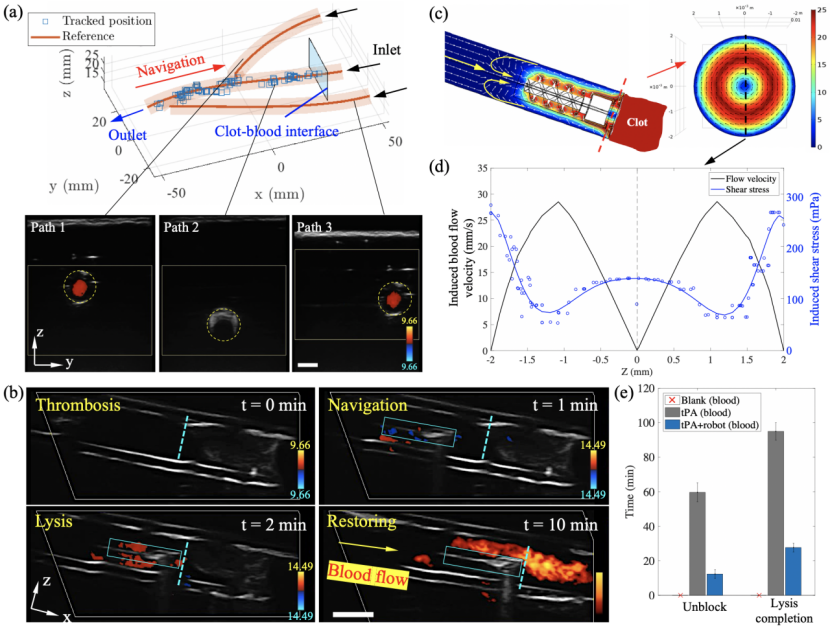
图 5. 多普勒信号引导的血栓定位及加速溶栓应用。
文章链接:https://pubs.acs.org/doi/abs/10.1021/acsnano.1c07830