中科院沈阳自动化所刘连庆研究员课题组:利用气泡作为微型机器人实现零件的操纵和装配
发布日期:2021-09-01
浏览量:1989次
工业机器人已被广泛应用于制造和组装,但是在微观尺度上,大多数组装技术只能将微模块简单的排列在一起,很难将其装配在一起形成一个不易分散的实体。近日,中国科学院沈阳自动化研究所刘连庆研究员领导的微纳米机器人课题组利用激光产生和控制的气泡作为微型机器人,将不同形状和功能的微小零件装配在一起。这些微小零件是通过PμSL微纳光固化3D打印技术(摩方精密,nanoArch S130超高精度微纳3D打印系统)制备而成。在这项研究中,表面气泡充当芯片上的微型机器人。这些微型机器人可以移动、固定、抬起和放下微型零件,并将它们集成在一起,形成紧密连接的实体。
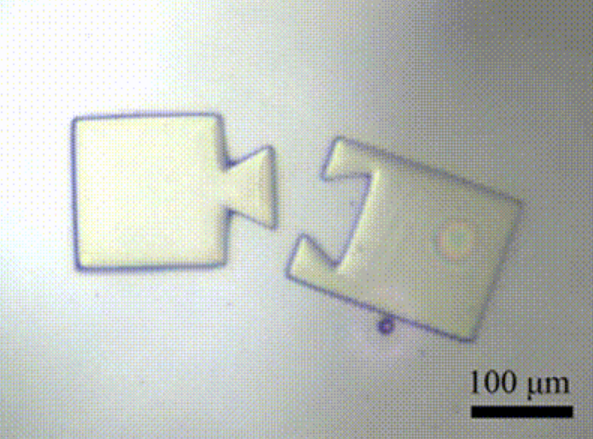
以燕尾形零件的装配过程为例(图1),气泡机器人首先将带有榫舌的微型零件抬起,而后另一个移动微气泡机器人将带有卯眼的微型零件移动至指定的位置,原先的微气泡在激光关闭后缓慢消失从而使得榫舌结构插入卯眼中。用此方法装配的微型零件可以作为一个整体运动而不会分离。类似地,将不同类型的零件整体组装可以得到不同的结构,例如齿轮、蛇形链条和车辆,然后由气泡微型机器人驱动它们以执行不同形式的运动。这种组装技术既简单又有效,有望在微操作、模块化组装和组织工程中发挥重要作用。该工作以“Integrated Assembly and Flexible Movement of Microparts Using Multifunctional Bubble Microrobots”为题发表在ACS Applied Materials & Interfaces上。https://doi.org/10.1021/acsami.0c17518
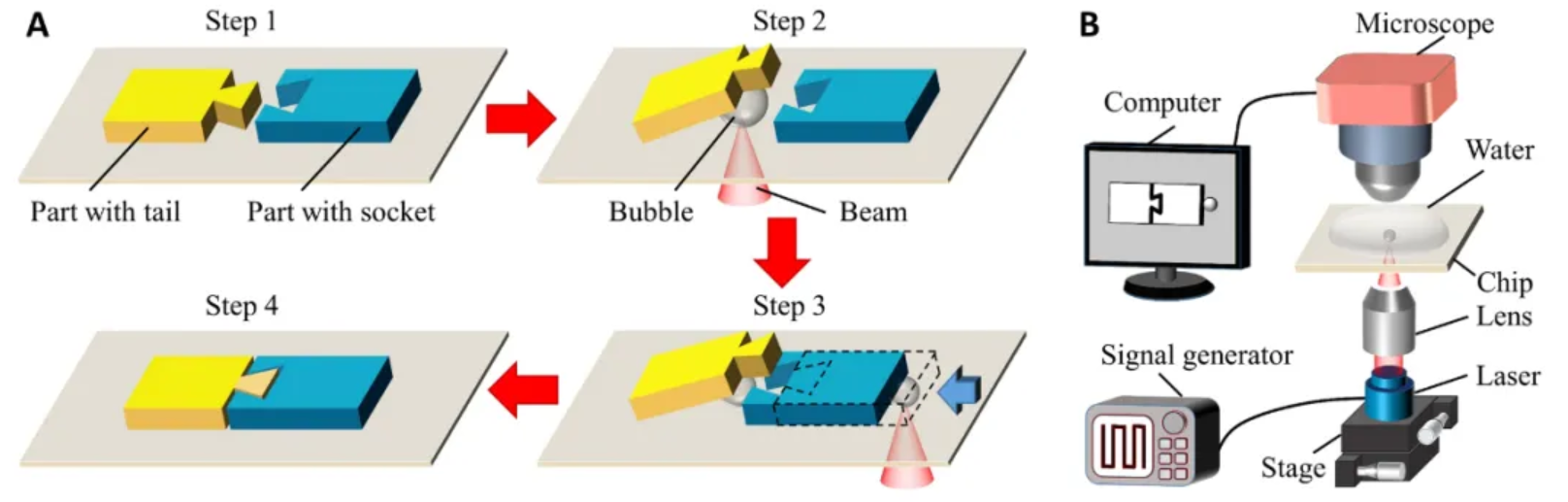
图1. 装配过程和实验系统示意图。
A) 燕尾形零件的装配过程。B) 系统的示意图。
当激光照射在非晶硅表面时,由于光热效应,在固液界面处会产生一个气泡,并可在激光的控制下进行移动。当气泡产生在微模块的底部时,气泡可将微模块抬起。本研究利用气泡产生过程快而溶解过程慢的特点,先控制一个气泡将微零件抬起,然后利用第二个气泡移动另一个微零件。当第一个气泡缓慢消失时,第一个零件缓慢落下,两个微零件能够装配在一起。利用气泡对微零件的三维操作能力,将二维组装变为三维装配。
利用不同形状的微零件,可以得到齿轮(图2)、链条(图3)和小车(图4)等不同的结构,这些结构在气泡的驱动下可以进行多种灵活的运动。
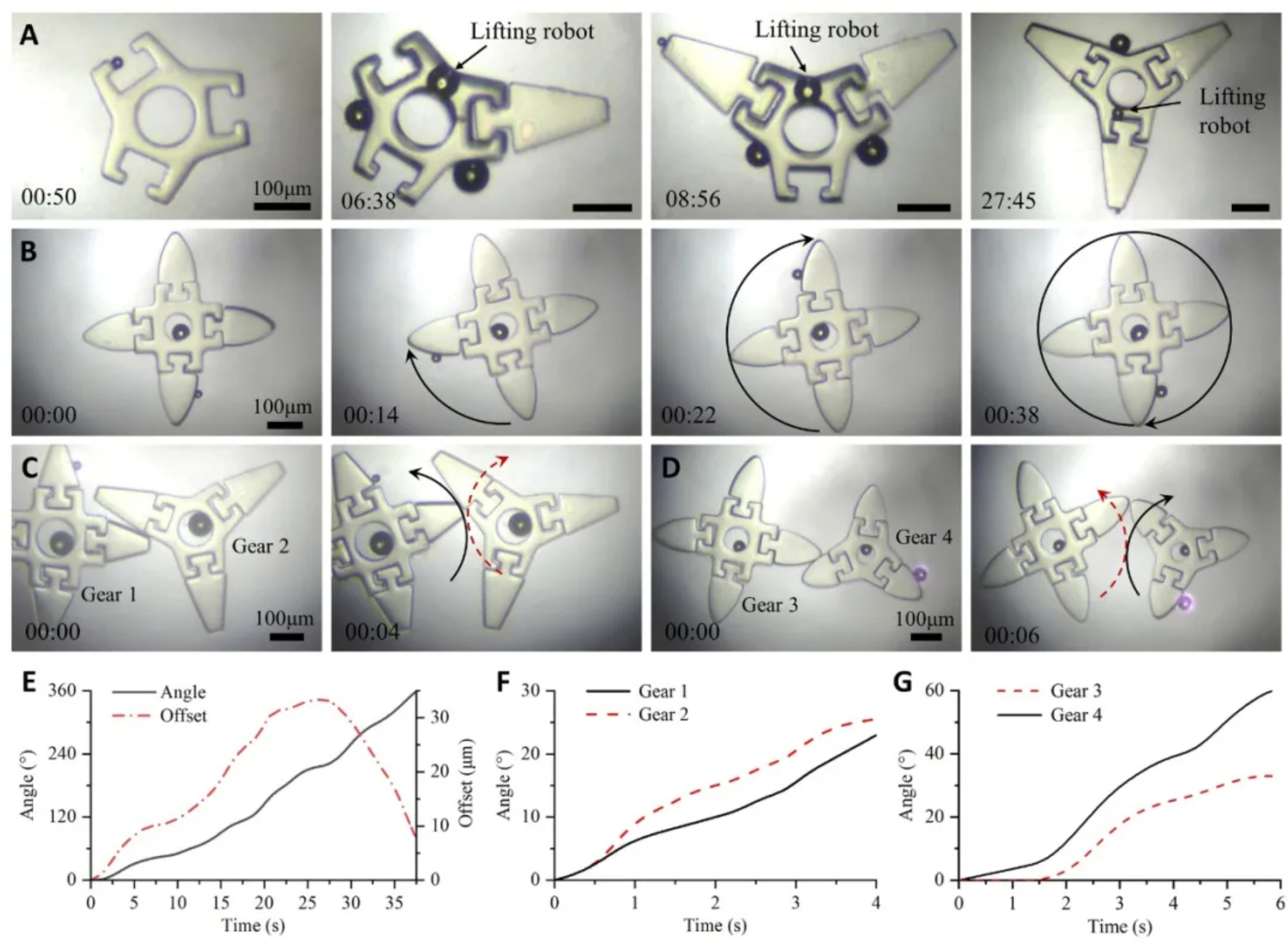
图2. 齿轮结构的装配过程及运动
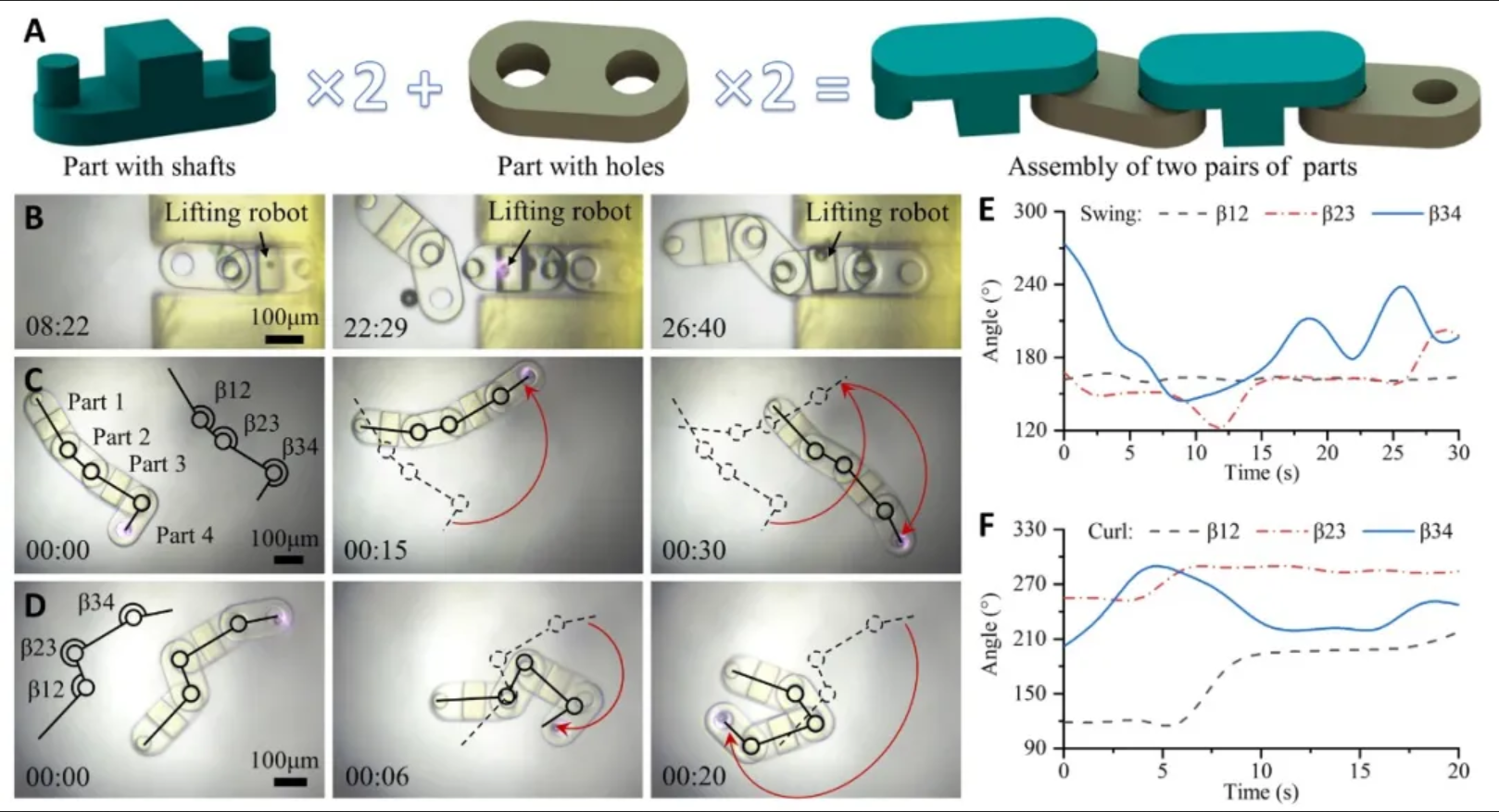
图3. 链条结构的装配过程及运动
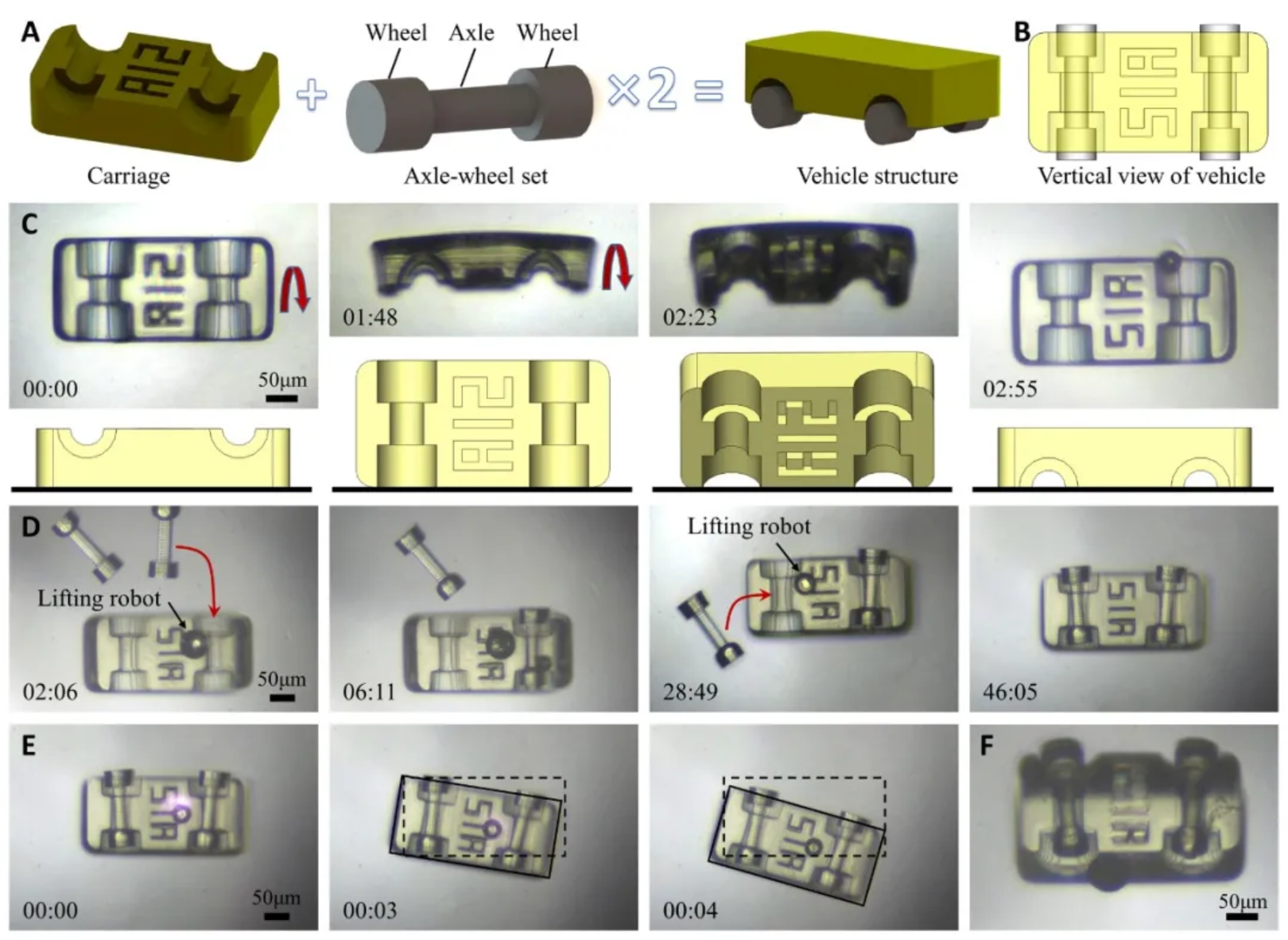
图4. 小车结构的装配过程及运动
总而言之,该研究利用微小气泡作为机器人,对微零件进行抬起、移动、固定等操作,并利用气泡机器人的三维操作能力,将多个零件装配成整体,提供了一种新的微尺度操作和装配技术。
(以上相关介绍内容由中科院沈阳自动化所微纳米机器人课题组代利国博士提供)
上述研究工作涉及的PμSL微纳3D打印技术由摩方精密提供,因此摩方公司就这一创新型成果对中科院沈阳自动化所微纳米机器人课题组进行了更进一步的补充访谈,以下为部分内容:
1、BMF:请问利用气泡作为微型机器人来操纵微型零件有哪些优势?潜在的应用有哪些?
代博士:气泡作为微型机器人,可以对单个的零件进行多种形式的操作,特别是可以控制微模块的三维姿态,这是其相比于其他微纳操作技术的优势。其可以用于操作细胞、颗粒和微模块等,在生物医学、组织工程等领域都有应用前景。
2、BMF:请问在这次研究中,为什么采用微纳3D打印的制备方式?
代博士:我们设计的零件包含各式各样的微米尺度接头,比如燕尾形的榫舌和卯眼等,其中最小细节尺寸30μm,并且这些结构有尺寸配合的要求。摩方公司的微纳3D打印技术可以很好的满足我们的要求,尺寸和形状都可以按照设计进行灵活加工,误差也在可控范围内。此外,面投影光刻3D打印技术可以批量化快速制作零件,有助于实验的顺利完成。